浅析整车电子电气架构中的智能执行器
还记得两三年前,当我们谈论电子电气架构(Electrical/Electronic Architecture,EEA)的时候,还是谈论分布式架构到域控架构的升级,关于中央计算单元+区域控制器架构,感觉还是遥不可及,电子电气架构发展阶段图如下所示。
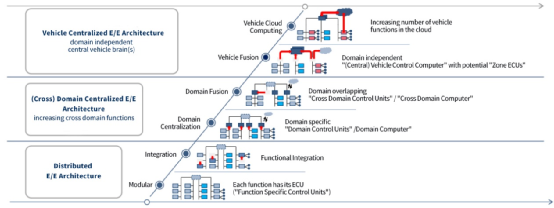
▲图1博世的电子电气发展阶段图
而今,我们眼看各个主机厂的中央计算单元架构都要纷纷落地了,小鹏的X-EEA3.0中央计算平台+区域控制架构、广汽埃安的星灵中央计算平台架构、长城的GEEP3.0计算平台架构、理想的LEEA3.0等。
在电子电气架构的技术变革中,整车上各ECU的功能被重新分配和整合到域控制器或者是中央控制器中,比如VCU和BMS以及电机控制器等被整合成动力域控制器,各个车身控制的逻辑被上移至车身域控制器,泊车控制器和行车控制器整合成智驾控制器等。
以特斯拉为例,其最新一代的车身控制器架构中,用了三个车身域控(左右前)来实现大多数的车上的执行器的操作从而省却了传统的ECU。下图为特斯拉的前车身控制板控制的外部执行器。
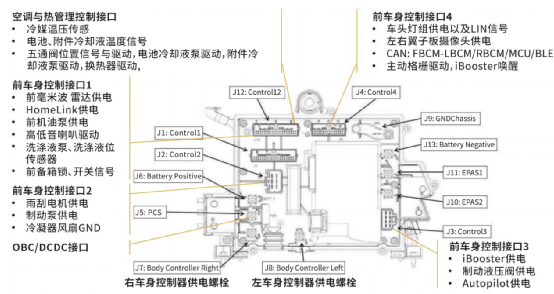
▲图2特斯拉的前车身控制板控制的外部执行器
在这样的变革中,当前阶段看到三个问题有待解决。
第一个问题是当前的整车EE的架构的还在快速迭代中,有些智能执行器的功能在新车型上会被临时增加,集成的车身域控中可能未必实现考虑到这样的执行器的布置。举个例子来讲有些车厂增加了自动充电小门的功能,或者旋转大屏的功能,这些增加的功能又不在原本的域控的计划内,这就需要有一个简便的智能执行器的增加方式。
第二个问题是由于集成域控的功能过于集中,一个在域控板卡上的小部件的损坏会带来比较大的维修成本,包括拆卸的人工,故障定位和更换售后的成本。
第三个问题是线束的数量。域控的出现原则上是减少线束的数量,重量和成本,但是事实上由于域控需要直接驱动各类电机,由于驱动电流相对比较大,往往很多需要走功率的线束需要从域控的接插件中走出,事实上各类电机线束和接插件PIN针的数量和成本并没有大幅减少,而且还带来了整车EMI的挑战。
在这样的前提下,业内对于执行器,有另一种发展的观点就是所谓的电子智能执行器的应用。 和传统的电机+执行机构+ECU架构不同的是,新一代的电子执行器往往做到驱动电路和位置反馈用传感器直接集成进电机机构中,使得执行器成为一个带有LIN总线接口或者CAN总线接口的小型化的标准器件从而大大减少传统的ECU和电机执行机构之间的线缆连接的数量。
举一个例子来讲就是新能源汽车的隐藏式电子出风口的应用:一个电子出风口,由于要支持上下和左右的风扇摆动,在一个出风口内要安装两个步进电机。一辆车前部四个出风口,后部两个出风口,就需要总共驱动12个步进电机。
▲图3新能源汽车隐藏式电子出风口应用
每个步进电机需要4根驱动线,如果直接采用中央域控的方案,那就需要总共48根驱动线来控制所有的风门电机,而且全部都需要连接到域控的输出接插件上面。这样方式无论是从线缆的成本来讲,或者系统装配的复杂度来讲,都不是最优的。
如果采用智能执行器,将步进电机和电机的驱动电路(驱动电路做集成在电机模块内部)做成一个标准的模块,对外信号就只剩下12V,GND,LIN_IN和LIN_OUT,那就利用LIN的Bus Shunt Mode(BSM)来构成级联的方式大大减少总的线缆数量。在域控上只需要在LIN总线发对应的位置命令就可以,而不在需要去关注电机和步进电机的驱动。
从成本上来讲,虽然每个电机都有个单独的驱动貌似会增加一点成本,但是由于线缆的数量/长度以及域控接插件的PIN脚大为减少,其实总的成本反而会减少。另外,后续的维修成本也因为控制部分不在域控上从而大大减少。这个就是智能执行器所给予的车身域控架构的一个很好的补充。 类似的智能执行器,在新能源车上的应用比比皆是,比如:电子充电门,电子旋转大屏执行器,电子水阀,AGS,大灯随动,座椅通风电机控制等。
电子执行器的关键是电子控制电路需要做的很小,可以内嵌入电机执行机构中把电机变成一个标准的可以通过LIN或者CAN总线来进行直接数字控制的部件。而要做到这点,就只有有高集成度的电机控制SoC专用芯片才能做到。 这样的芯片,目前市面上有的并不多,比如比利时Melexis公司的MLX81332,或者德国Micronas的HVC4223这样的芯片。
可喜的是,目前国内的半导体公司也看到这一趋势并开发出了类似的SoC芯片来填补这一应用细分领域的国内空白,目前知道的有纳芯微的NSUC1610 。
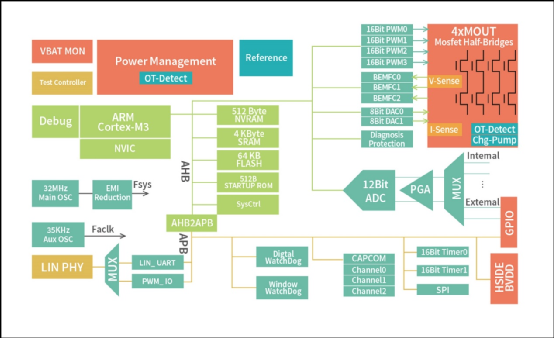
▲图5纳芯微NSUC1610
这个芯片最大的特点就是可以用汽车12V电池直接供电并在内部集成电源,LIN总线物理层,4个半桥的驱动满足20W以内直流有刷,直流无刷或者步进电机的直接驱动。基本上在PCB上就不在需要太多外围元器件就可以直接搭建一个电子执行器的驱动电路。完美的满足一个电子执行器要的全部功能。 在高集成度SoC电子芯片的推动下,智能执行器在新能源汽车的新的EE架构中可能会是后续车身域控的一个完美的补充。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。