前言
电动汽车(EV)与传统内燃机汽车(ICEV)虽然有着完全不同的动力总成部件,但从Powertrain(动力系统)架构上来看依然可以分为储能单元和驱动单元两部分。EV采用动力电池系统取代了油箱来储能,因此增加了电池管理系统(BMS)。同时EV采用了电机取代内燃机来驱动车辆,因此电机控制器(MCU)代替了发动机控制单元(ECU)。那么为什么EV还需要比ICEV多增加一个整车控制器VCU(Vehicle Control Unit )呢?因此本文主要讨论一下VCU在电动汽车中的作用。
整车控制器(vehicle control unit,VCU)即动力总成控制器,是新能源汽车的核心控制部件,它必须具有高可靠性以及良好的容错性、电磁兼容性和环境适应性,以保障新能源汽车的安全、稳定运行。
如果把整车控制系统比作学学生会,那么整车控制器则是学生会主席,其他控制单元则是各部部长。就像学生会主席可以为各部部长分配任务一样,整车控制器可以控制新能源汽车的其他控制单元,使新能源汽车实现行走、制动、转向等功能。
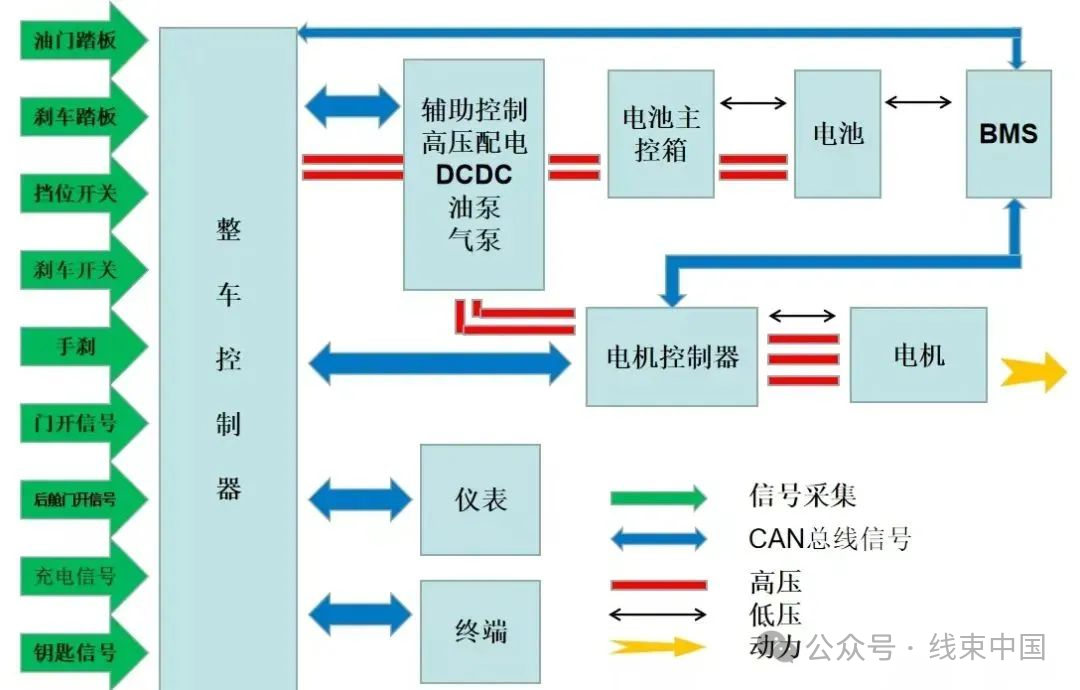
整车控制器能采集加速踏板位置信号、制动踏板信号及其他部件信号并进行相应判断,控制下层各部件控制单元动作,进而实现相应功能。同时, 整车控制器还能通过CAN总线对整车运行状态进行管理和调度。
02
组成与原理
主要分为集中式控制和分布式控制两种方案
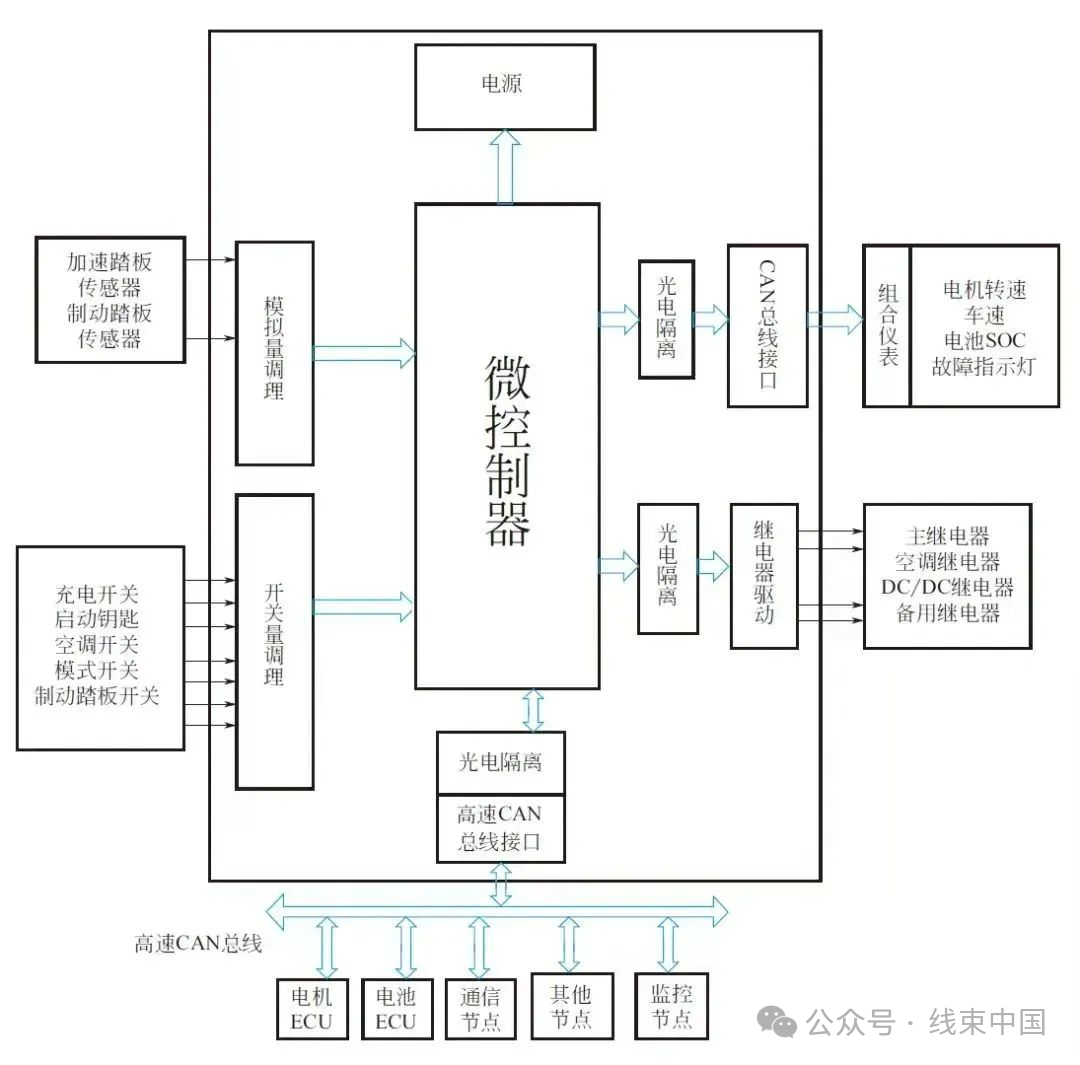
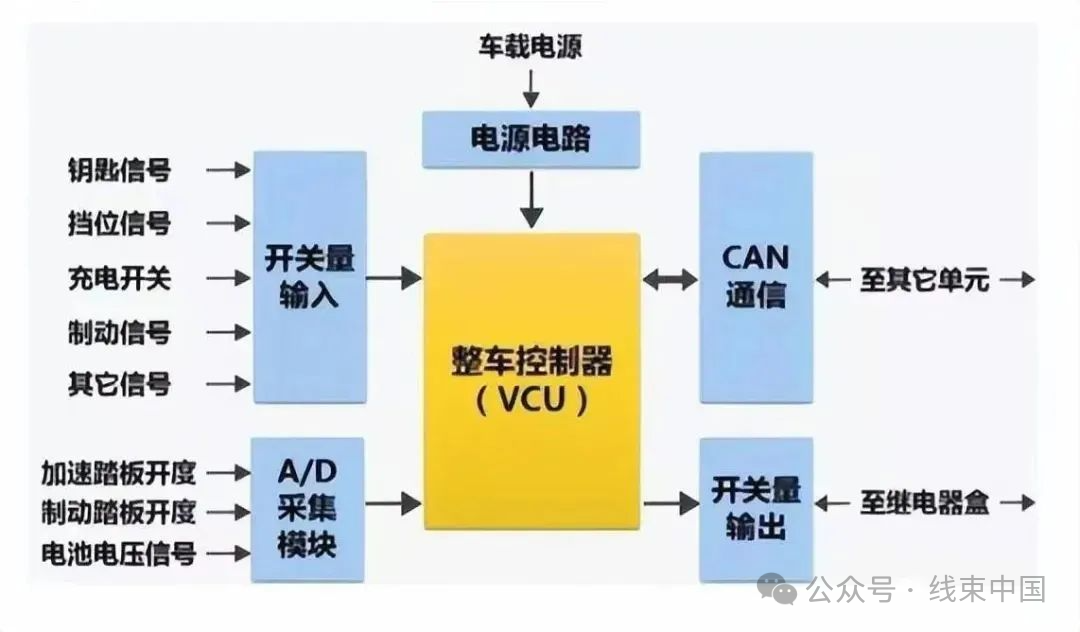
集中式控制系统的基本思想是整车控制器独自完成对输入信号的采集,并根据控制策略对数据进行分析和处理,然后直接对各执行机构发出控制指令,驱动纯电动汽车的正常行驶。
集中式控制系统的优点是处理集中、响应快和成本低;缺点是电路复杂,并且不易散热。
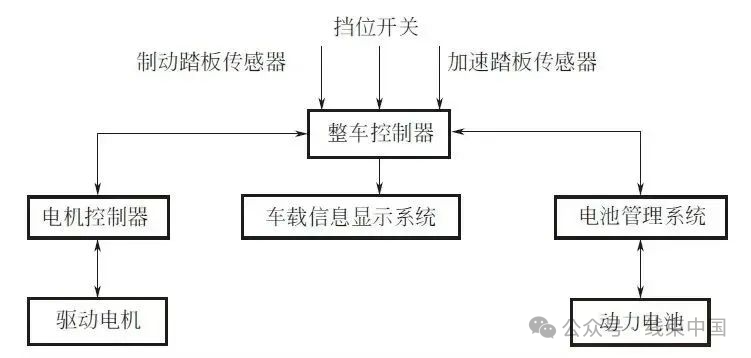
分布式控制系统的基本思想是整车控制器采集一些驾驶员信号,同时通过CAN总线与电机控制器和电池管理系统通信,电机控制器和电池管理系统分别将各自采集的整车信号通过CAN总线传递给整车控制器。整车控制器根据整车信息,并结合控制策略对数据进行分析和处理,电机控制器和电池管理系统收到控制指令后,根据电机和电池当前的状态信息,控制电机运转和电池放电。
分布式控制系统的优点是模块化和复杂度低;缺点是成本相对较高。
03
基本功能

(1) 对汽车行驶控制的功能电动汽车的驱动电机必须按照驾驶员意图输出驱动或制动转矩。当驾驶员踩下加速踏板或制动踏板时,驱动电机要输出一定的驱动功率或再生制动功率。踏板开度越大,驱动电机的输出功率越大。因此,整车控制器要合理解释驾驶员操作;接收整车各子系统的反馈信息,为驾驶员提供决策反馈;对整车各子系统的发送控制指令,以实现车辆的正常行驶。
(2) 整车的网络化管理整车控制器是电动汽车众多控制器中的一个,是CAN总线中的一个节点。在整车网络管理中,整车控制器是信息控制的中心,负责信息的组织与传输、网络状态的监控、网络节点的管理以及网络故障的诊断与处理。
(3) 对制动能量的回收纯电动汽车区别于内燃机汽车的重要特征就是能够进行制动能量回收,这是通过将纯电动汽车的电机工作在再生制动状态来实现,整车控制器分析驾驶员制动意图、动力电池组状态和驱动电机状态等消息,并结合制动能量回收控制策略,在满足制动能量回收的条件下对电机控制器发送电机模式指令和转矩指令,使得驱动电机工作在发电模式,在不影响制动性能的前提下将电制动回收的能量储存在动力电池组中,从而实现制动能量回收。
(4) 整车能量管理和优化在纯电动汽车中,动力电池除了给驱动电机供电以外,还要给电动附件供电,因此,为了获得最大的续驶里程,整车控制器将负责整车的能量管理,以提高能量的利用率。在电池的SOC值比较低的时候,整车控制器将对某些电动附件发出指令,限制电动附件的输出功率,来增加续驶里程。
(5) 对车辆状态的监测和显示整车控制器通过直接采集信号和接收CAN总线上的数据的方式获得车辆运行的实时数据,包括速度、电机的工作模式、转矩、转速、电池的剩余电量、总电压、单体电压、电池温度和故障等信息,然后通过CAN总线将这些实时信息发送到车载信息显示系统进行显示。此外整车控制器定时检测CAN总线上各模块的通信,如果发现总线上某一节点不能够正常通信,则在车载信息显示系统上显示该故障信息,并对相应的紧急情况采取合理的措施进行处理,防止极端状况的发生,使得驾驶员能够直接、准确地获取车辆当前的运行状态信息。
(6) 故障诊断与处理连续监测整车电控系统,进行故障诊断。故障指示灯指示出故障类别和部分故障码。根据故障内容,及时进行相应安全保护处理。对于不太严重的故障,能做到低速行驶到附近维修站进行检修。
(7) 外接充电管理实现充电的连接,监控充电过程,报告充电状态,充电结束。
(8) 诊断设备的在线诊断和下线检测负责与外部诊断设备的连接和诊断通信,实现UDS诊断服务,包括数据流的读取,故障码的读取和清除,控制端口的调试。