英伟达智能驾驶的核心芯片——Thor
智能驾驶技术的不断升级,不光把安全性将至少提高一个数量级,也成为下一代智能电动汽车的核心卖点。作为智能驾驶系统的核心,智能驾驶芯片应该满足以下要求:
● 大算力
● 安全性和可靠性需:通过AECQ100标准,系统级功能安全性要达到FIT(每10亿小时故障数)在百以内,DPPM(每百万片返修率)在个位数
● 模块的时延要极低,以确保算法有足够的时间进行处理和响应。快速可靠的备份系统,系统在出现故障时能够瞬间完全接管。
现在的问题是,我们能不能用得上下一代的英伟达Thor呢?先不说多少钱的问题!
一)智能驾驶的核心芯片
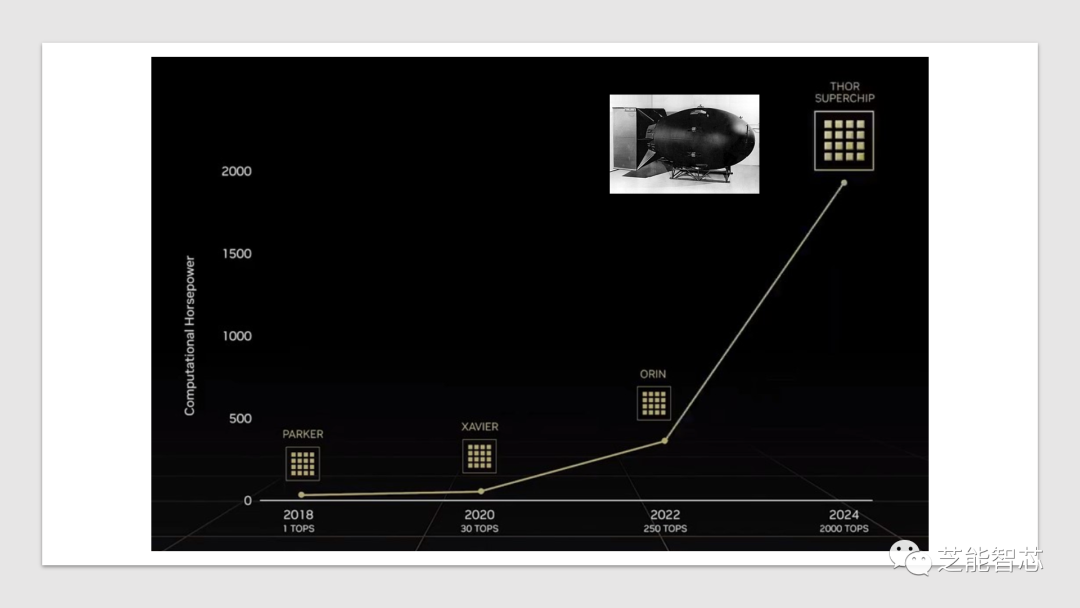
英伟达原定于 2024 年推出 Atlan,现在雷神(Thor)现已取代Atlan,带来了显著的性能提升,Thor 带来了两杯的性能,推动下一代 GPU 以及新的 Grace Neoverse V2 驱动的核心,进入下一代自动驾驶/嵌入式平台,超越今天的 Orin 平台。
新平台不仅可用于提供信息娱乐和驾驶辅助功能的动力,还具备多域计算功能,可以同时运行 Linux、QNX 和 Android 等操作系统。未来Thor 可能会取代许多汽车上的计算机,带来更低的功耗以及对计算机和布线的重量/包装要求更低。
为支持需要更多处理能力的应用,NVLink C2C 被设计用于连接多个 Thor 芯片。
二)数据和芯片 平台
数据是智能驾驶的关键驱动力,智能驾驶芯片需要在行驶过程中实时收集数据,关注极端场景、记录特殊交通信息,验证路段可用性,并实现快速闭环。
● 系统带宽和车辆云链路必须足够强大,以确保数据可以自由流动。
● 处理能力必须强大且兼容各种主流智能驾驶算法,CPU算力越强越好,NPU的能力也不能少。
智能电动汽车是一个长周期持续迭代的高科技产品,算法可以在足够的算力支撑下上不断升级最新的算法,修复长尾bug,持续提升智能驾驶体验,在未来几年中,智能驾驶算法将朝着端到端和大模型方向发展。智能驾驶芯片不仅需要满足当前需求,还需要考虑未来,以完美匹配端到端大模型算法。
我们中国企业的下一代在哪里?Thor我们用得起么?美国人给我们用么?
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。