怎么设计一种基于Simulink的电机助力转向系统呢?
1、工作原理
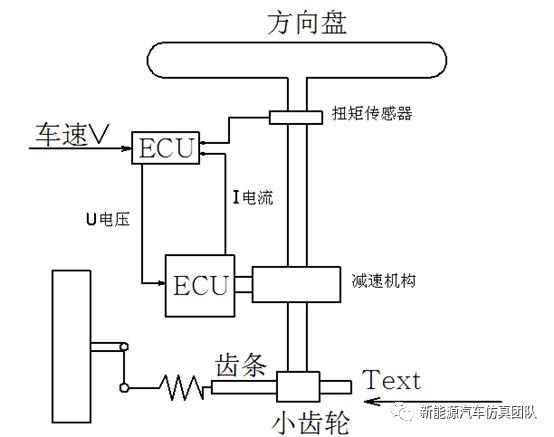
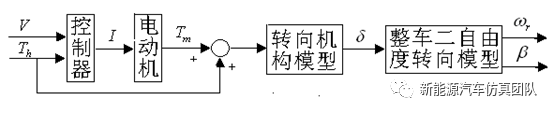
下图为电动转向系统结构原理图:
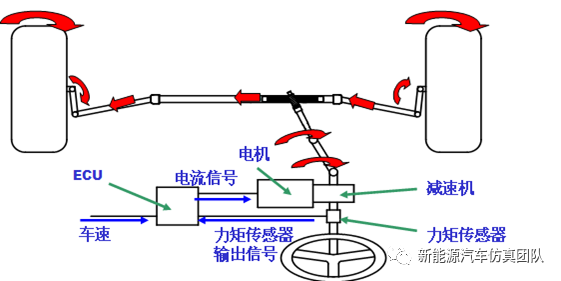
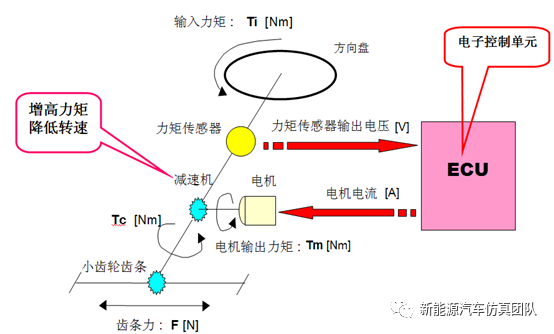
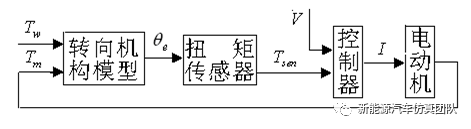
下图为电动转向原理图:
EPS系统的正向输入系统框图为:
EPS系统的逆向输入系统框图为:
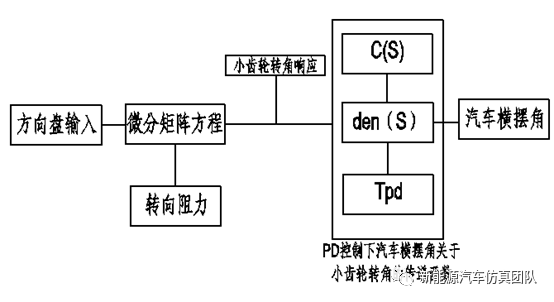
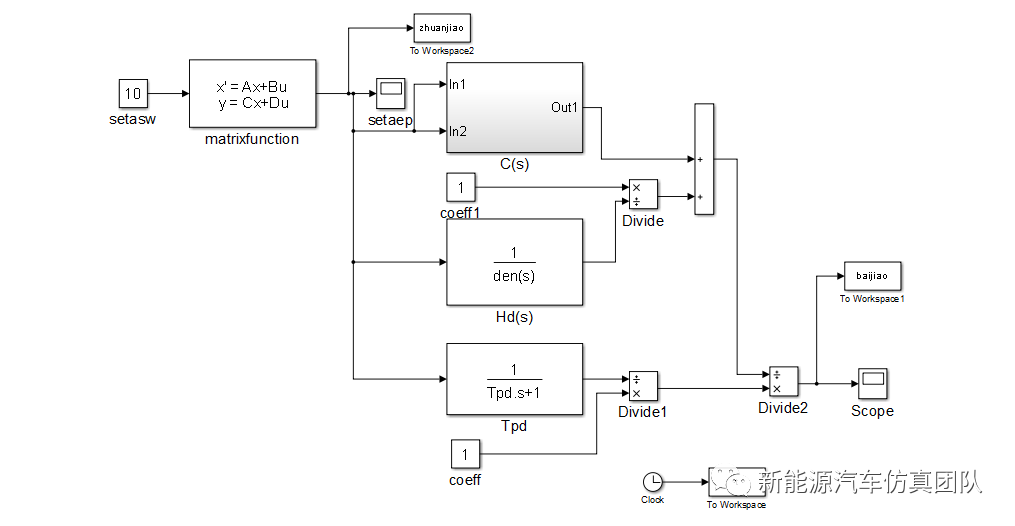
基于Simulink模型整体函数传递框图为:
2、电动助力转向系统数学模型及参数
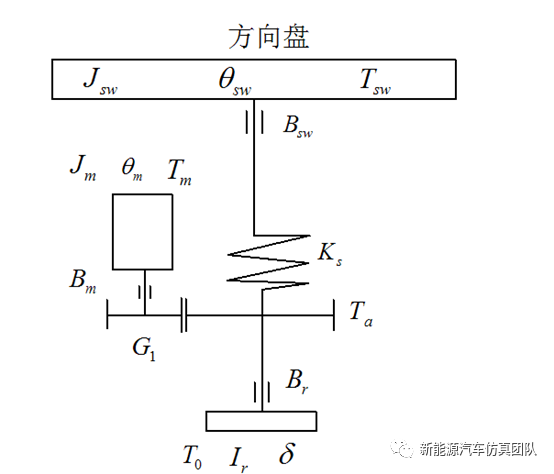
2.1、系统的动力学分析
以方向盘为研究对象建立动力学模型:

以小齿轮为研究对象建立动力学方程:

2.2、电动机模型分析
本系统采用直流电动机为驱动电机,额定电压为U,电感为L,电枢电阻为R,反电动势常数为Kb,电动机扭矩系数为Ka,转速为N,则有如下关系式成立:

当电动机趋于稳定状态,电感不发生作用,电流稳定时上式可简化为:

电动机输出扭矩为:

式中,

G1为电机减速机构传动比,则电动机作用在转向系统立柱的助力扭矩为:

以电机为研究对象建立动力学模型:

式中,δ为前轮转角。
直流电动机有两种控制策略,比例控制和比例加微分控制(PD)。
若系统采用PD控制器来控制电机,则电机的驱动电压U为:

2.3、电动助力转向系统数学模型

式中,T0为转向阻力矩,Mr为主要由原地转向阻力矩,Mz为回正力矩,车轮转向角α,侧偏角φ,车速v,行驶的路面,轮胎的类型及其气压,车身重量,前轴负荷及各个传动系统的摩擦力等相关的非线性的函数关系,为简化分析以下式来表达阻力矩:

上述方程为二元微分方程,为分析其特性建立矩阵方程,令:
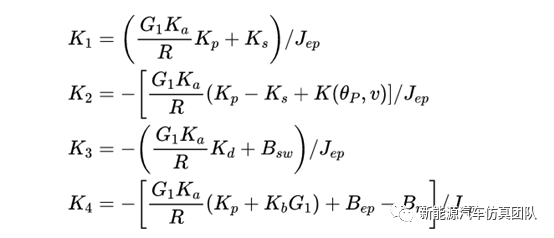
据上述可得到矩阵方程:

系统的输入量为:

可得系统的状态方程为:
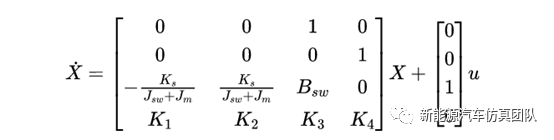
系统的输出方程为:

线性二自由度汽车模型方程如下:

递推过程此处简化,最终可得:
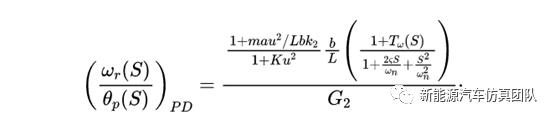

EPS系统的汽车和普通转向系统的汽车相比较,EPS系统的横摆角速度稳态增益小于普通转向系统。同时可以通过修改M文件中的参数值来获得在不同车速下的增益。
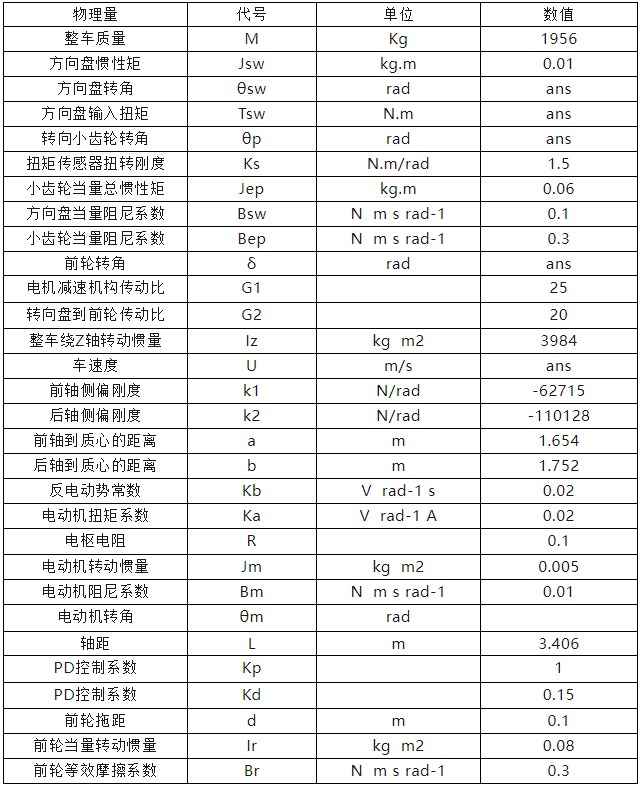
2.4、汽车EPS结构参数
%汽车质心侧偏角&横摆角对前轮转向角的传递函数参量%
%参量设置%
k1=-62715;%前轴侧偏刚度%
k2=-110128;%后轴侧偏刚度%
m=1956;%整车质量%
a=1.654;%前轴到质心的距离%
b=1.752;%后轴到质心的距离%
Iz=3984;%整车绕Z轴转动惯量%
L=3.406;%轴距%
u=20;%车速%
d=0.1;%前轮拖距%
R=0.1;%电枢电阻%
Wn=((k1*k2*L*L)/(m*Iz*u*u)+((a*k1-b*k2)/Iz))^(1/2);%汽车转向响应的固有频率%
K=m/(L*L)*(a/k2-b/k1);%稳定性因数%
Kv=250;
eta=(-m*(a*a*k1+b*k2)+Iz*(k1+k2))/(2*m*Iz*L*((1+K))^0.5);%汽车转向响应的阻力比%
Gbeta0=((1+m*a*u*u/(L*b*k2))/(1+K*u*u))*(b/L);%稳态侧偏角增益%
Gomiga0=(1/(1+K*u*u))*(u/L);%稳态横摆角速度增益%
Tbeta=-((Iz*u)/(L*b*k2))*(1/(1+m*a*u*u/(L*b*k2)));%
Tomiga=-m*a*u/(L*b*k2);
Ka=0.02;%电动机扭矩系数%
Kb=0.02;%反电动势常数%
Ks=1.5'%扭矩传感器扭转刚度%
Kp=1;%PD控制系数%
Kd=0.15'%PD控制系数%
Jep=0.06;%小齿轮当量总惯性矩%
Ir=0.08;%前轮当量转动惯量%
Jm=0.005;%电动机转动惯量%
G1=20;%电机减速机构传动比%
G2=20;%转向盘到前轮传动比%
Br=0.3;%前轮等效摩擦系数%
Bm=0.01;%电动机阻尼系数%
Bsw=0.1;%方向盘当量阻尼系数%
Bep=0.3;%小齿轮当量阻尼系数%
lamude=1+(Ka*Kp)/R*G1;%助力系数%
K1=(G1*Ka*Kp/R+Ks)/Jep%矩阵方程系数%
K2=-(G1*Ka/R*(Kp-Ks+Kv))/Jep%矩阵方程系数%
K3=-(G1*Ka/R*Kd+Bsw)/Jep
K4=-(G1*Ka*(Kp+Kb*G1)/R+Bep-Bm)/Jep
mel=G1*Ka*Kd*Ks/R;
Wp=(lamude*Ks/(Ir+Jm*G1^2))^0.5;
Tpd=mel/(lamude*Ks);
setapd=(Br+Bm*G1*G1+Ka*Kb*G1*G1/R+mel)/(2*(lamude*Ks*(Ir+Jm*G1*G1))^0.5);%PD控制器EPS系统阻尼比%
2.5、仿真结果
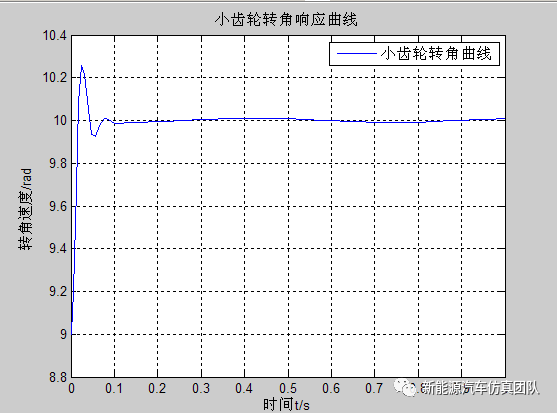
上图为PD控制状态下,条件为V=10m/s时小齿轮转角相对于方向盘扭矩输入时的系统响应。因本次仿真只是针对EPS系统的特性分析,所以将输入扭矩信号设为恒扭矩。在电机助力的条件下,系统的瞬时响应有了很明显的提高,由于车速的增加转向阻力变小,小齿轮转动阻力变小,系统调整到稳态时间缩短。从图5可知系统有电动助力转向时,系统响应很快,在0.1秒左右系统的响应就趋于稳定,表明了系统的良好的响应特性。
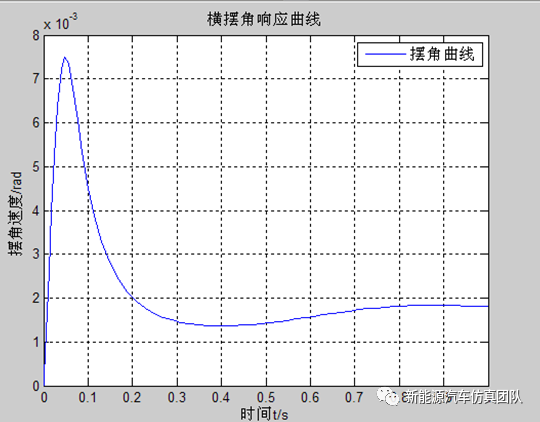
电动助力转向采用PD控制策略,同普通的助力转向相比较,据相关文献,其具有震荡不稳定性,而电动助力转向系统下横摆角输出响应很快就趋于稳定。
EPS系统控制方式对汽车的瞬态响应有显著的影响,PD控制方式的EPS系统抑制横摆角速度的不规则波动,并使其迅速趋于稳态值,有利于改善汽车的瞬态响应品质,但系统的反应时间上有些延长。
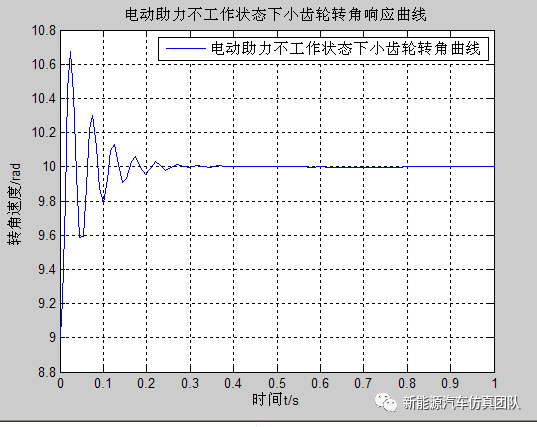
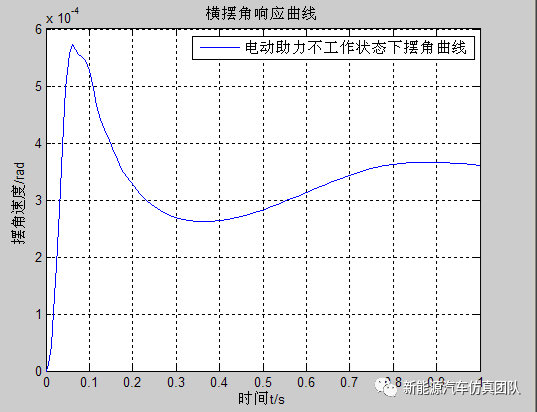
由上图可知,有电动助力转向情况下,汽车的转向系统中的小齿轮转角响应很平稳,汽车横摆角输出响应相对于无电动助力转向下汽车横摆角输出响应趋于稳定性比较明显。
EPS系统的汽车,其转向系统的固有频率比普通的转向系统的固有频率小,接近于汽车横摆角固有频率,因此其在约0.05秒处出现一个较大的共振峰波,当驾驶员的操作频率接近这个频率范围时,汽车的横摆角速度对转向盘转角及其敏感,汽车很容易失去控制。提高EPS的固有频率便于提高汽车的操纵稳定性。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。