以LPC935单片机为主控制器的智能太阳能路灯控制系统设计
随着科学技术的迅速发展,世界能源危机日益严重,利用常规能源已不能适应世界经济快速增长的需要,开发和利用新能源越来越引起各国的重视。太阳能源本身的安全可靠、无噪声、无污染和可再生性的特点,加之现今光伏技术的逐渐成熟,利用光伏发电成为解决能源问题的一大途经。
智能太阳能路灯是利用太阳能组件的光生伏特效应,将光能转换为电能,并储存在蓄电池中供负载使用,它是集太阳能光伏技术、蓄电池技术、照明光源技术于一体的新兴技术。太阳能路灯控制器是应用于太阳能光伏系统中,协调太阳能电池板、蓄电池、负载的工作,使整个太阳能光伏系统高效,安全的运作。
1 智能太阳能路灯系统总体方案
智能太阳能路灯系统的由太阳能电池板、蓄电池、LED 灯( 主灯、副灯) 和控制器组成( 如图1 所示) 。白天太阳能电池板接受太阳辐射能并转化为电能输出,经过充电控制电路储存在蓄电池中; 晚间当光线照度降低时,控制器使副灯点亮,进行指示性照明。当控制器监测到有人经过时控制器同时点亮主灯和副灯,同时和相邻前后的灯通讯,控制邻灯主灯和副灯同时点亮,保证行人在该路段的照明。控制器检测到蓄电池充电或放电超出一定范围时,控制器切断充放电回路,保证电池不被损坏。遇到连续阴雨天季节可切换成市电照明,避免蓄电池长期亏电。
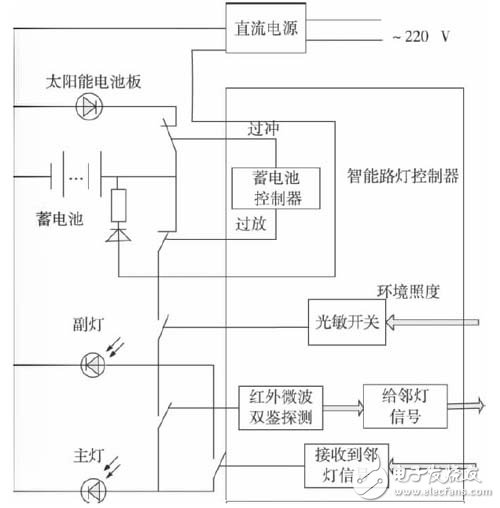
图1 智能太阳能路灯系统总体方案
2 控制系统硬件电路图设计
系统硬件是基于P89PLC935 单片机作为主控制器的基础,设计出符合功能要求的各个子模块,原理见图2。
( 1) 控制器
控制器选用P89LPC935 单片机,它是一款单片封装的微控制器,适合于本系统要求的高集成度、底成本的场合,可以满足多方面的性能要求,LPC935 采用了高性能的处理器结构,指令执行时间只需2 - 4 个时钟周期,6 倍于标准80C51,同时,LPC935 集成了许多系统级的功能,这样可大大减少元件的数目,它的8KBROM 能满足本系统程序存储器的要求,不需用扩展EPROM。
该单片机内置的2 个4 路输入的8 位A/D 转换器,不需再单独选用A/D 转换器,简化了外围硬件电路,P89LPC935 内部的看门狗电路及低电压掉电检测可在电源故障和受到强电磁干扰时使系统可靠复位,提高了系统的安全可靠性。
( 2) 环境照度的检测
本系统采用光敏开关检测环境照度。环境照度检测是整个路灯的总开关,只有在夜晚,环境照度较低的情况下,主副灯、人体感应单元及相应的控制电路开始工作,白天均不工作。白天时光敏电阻阻值小,比较器LM358 负端电压高于正端电压,比较器输出低电平,单片机接收到低电平,屏蔽各种通讯和感应信号,夜晚光敏电阻阻值大,比较器负端电压小于正端,输出高电平,单片机控制接收感应信号和通讯信号。
( 3) 人体感应单元
本系统采用被动式热释电红外、微波双鉴传感器作为人体感应单元。由于人体都有恒定的体温,一般在36. 5℃,所以会发出特定波长,一般是10μm 左右的红外线。人体发射的10um 左右的红外线通过菲涅尔滤光片增强后聚集到热释电元件上,热释电元件接受到人体红外辐射温度发生变化时失去电荷平衡,向外释放电荷,经后续电路检测处理并产生报警信号[2],但是,热气流,暖风也会造成被动式热释电红外探头发出错误信号,造成和相邻灯之间的误通讯。为了避免误通讯,同时采用微波传感技术,借助微波多普勒效应探测移动目标。使用热释电红外、微波双鉴传感器克服了单一技术的缺陷,解决了误通讯的问题,此传感器的模拟信号直接连接P0. 0( 内置A/D) ,不需要外接A/D 转换电路。
( 4) 通信单元
通信单元用于和相邻路灯通信,以控制邻灯主灯点亮,保证行人在相邻灯间的亮度。本系统采用PTR2000 无限嵌入式模块。PTR2000 是基于nRF401 基础上的无线数据传输模块,该模块包括工作频道的设置、接受、发送,通过设置TXEN、CS、PWR 3 个引脚设定工作模式,DO、DI 分别和单片机RXD、TXD 连接,通过串口和单片机进行数据传输,由单片机进行数据采集和处理。发送数据时,PTR2000 将单片机要发送的信号调制成射频信号发送到相邻灯,同时将相邻灯发送来的射频信号调制成单片机识别的TTL 信号。
( 5) 蓄电池充放电电路
蓄电池优良的特性和长的使用寿命在一定程度上取决于正确的充放电,错误的充电使蓄电池寿命缩短、性能变差,因此对蓄电池的过冲过放要采用保护电路,确保蓄电池的正常充放电。本系统采用蓄电池专用模块UC3906,它含有独立的电压控制电路和限流放大器,可以控 制UC3906 内部驱动器的输出,从而达到控制充电电流大小的目的。驱动器的输出电流可达25mA,可直接驱动外接串流调整管,从而调整充电器的输出电压和输出电流,UC3906 内部的电压和电流检测比较器用于检测电池的充电状态,并控制充电状态逻辑电路的相应输出信号。具体电路如图2 中所示。
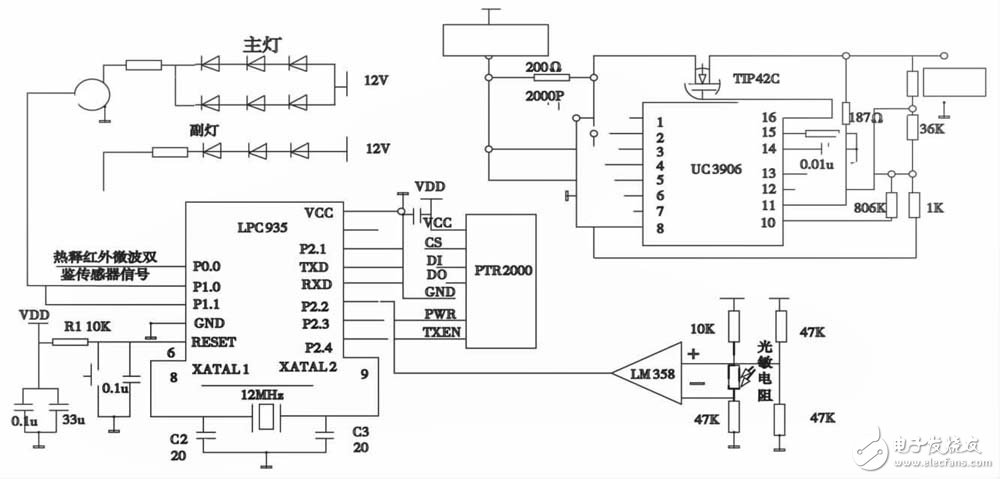
图2 智能太阳能路灯控制系统电路原理图
3 控制系统软件设计
控制软件程序采用C 语言编写,采用模块化结构( 流程图见图3) 。硬件上电复位后,首先对LPC935 单片机初始化,将P1. 0,P1. 1 设置为推挽模式,提高驱动能力,P0. 0 设为高阻状态屏蔽感应信号,其余各端口设置为准双向口,然后根据系统要求将与PWR 连接的P2. 3 设置为低电平,使之处于低功耗状态,此时不接受和发送数据。当光照亮度不够时,系统采集到P2. 2 口为高电平,将P1. 1 置位,副灯点亮进行指示性照明,同时把P0. 0 设置为准双向口,解除感应信号屏蔽,将PWR 置位TXEN 清零,使PTR2000 处于接收状态接收相邻灯的通讯信号。当有人通过时P0. 0 收到相应的信号后,P1. 0 置位,主灯点亮,同时将PWR 和TXEN 置位,使得PTR 处于发送状态并给相邻灯发送信号,相邻灯接收到信号后主灯点亮,保证了行人通过此段路的照明,延时30 秒后主灯自动熄灭,达到了无人通过时只有副灯进行指示性照明的效果,实现了智能化。
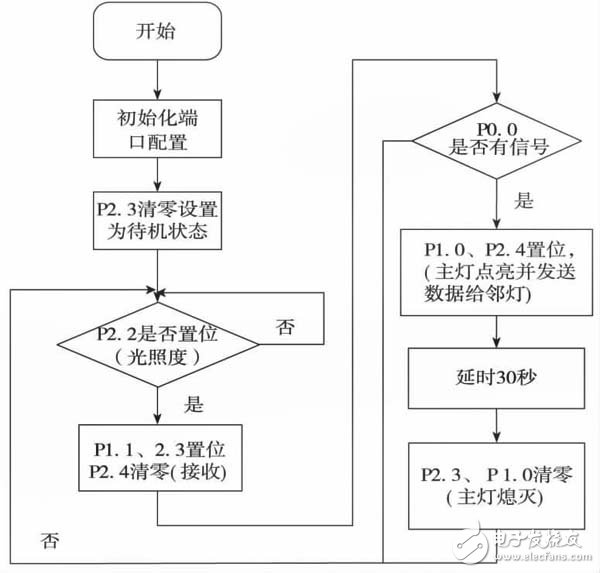
图3 智能太阳能路灯系统流程图
4 结束语
本文介绍的的智能太阳能路灯系统,经过实验,白天太阳能电池给蓄电池充电,夜间蓄电池放电,在夜晚,当没有人经过的时候,副灯点亮,指引道路,当有人靠经时主副灯同时点亮,同时向相邻灯发通信信号,前后邻灯也点亮。人体感应距离为12m,主副灯同时点亮时路面照度到达40lux,各项指标符合设计要求。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。