浅谈自动驾驶BEV感知方案
来源: 电子工程世界
新闻行业新闻
在高级别自动驾驶功能应用中,车辆的智驾系统必须能够解决corner case,即罕见却又无法完全避免的极端场景。这些场景数据样本较少,一旦模型不能有效识别,可能引发严重的安全事故。 前段时间,百度在Create大会上的辅助驾驶板块发布了一个挺硬核的内容,或许能有效解决corner case,车路一体的BEV感知方案——UniBEV。 BEV自动驾驶感知好比一个从高处统观全局的“上帝视角”,将三维环境信息投影到二维平面,以俯视视角展示环境中的物体和地形。在路径规划、障碍物检测、自动驾驶决策等方面,BEV感知都展现出了其独特的优势。
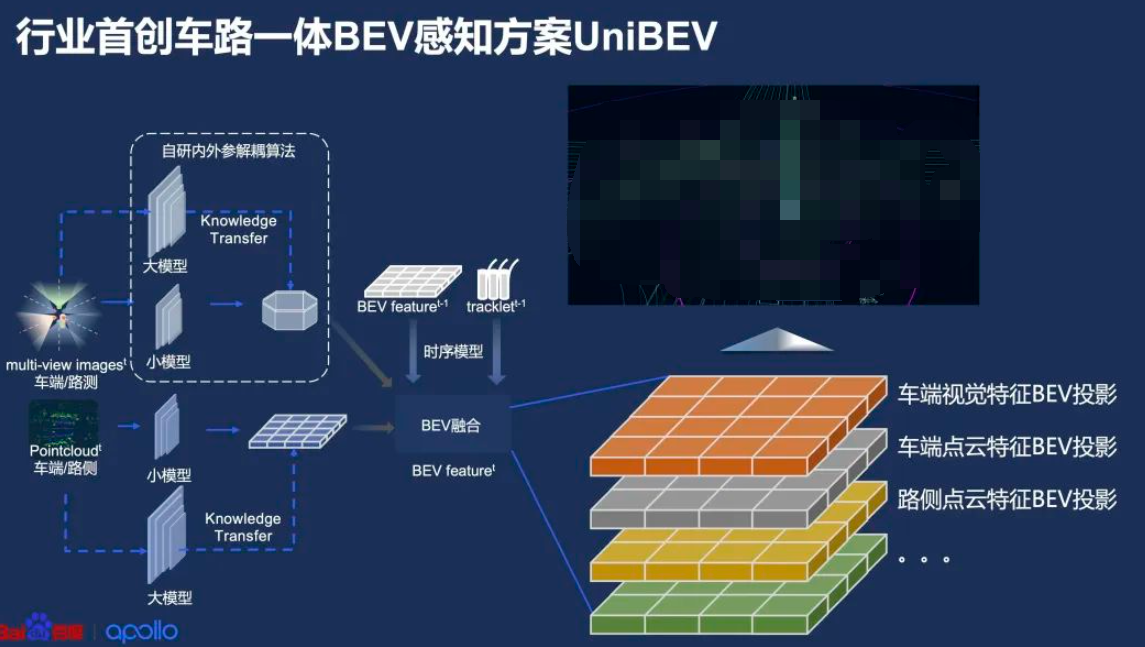
车路一体的BEV感知方案——UniBEV
路径规划:BEV感知可以将复杂的道路信息简化为一系列的路径点,使得路径规划更加简单、准确。
障碍物检测:BEV感知能够清晰地展示出车辆周围的障碍物,包括车辆、行人、道路标志等,使得障碍物的检测和识别更加准确。
自动驾驶决策:BEV感知可以为自动驾驶系统提供全面的环境信息,帮助系统做出更加智能的决策。
文章来源于: 电子工程世界原文链接
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。