适用于激光雷达发射端的GaN FET驱动器——HD1001
光探测和测距(Light detection and ranging),简称LiDAR,也就是激光雷达技术,被广泛应用于自动驾驶汽车、工业、无人机、机器人和3D绘图等终端市场中。车规级、可量产、低成本的固态激光雷达是激光雷达行业的未来发展趋势。

激光雷达发射端所发射的脉冲激光最重要的参数是脉冲宽度与功率。脉冲激光的脉宽越短、功率越高,则激光雷达的探测能力越强,分辨率越高。
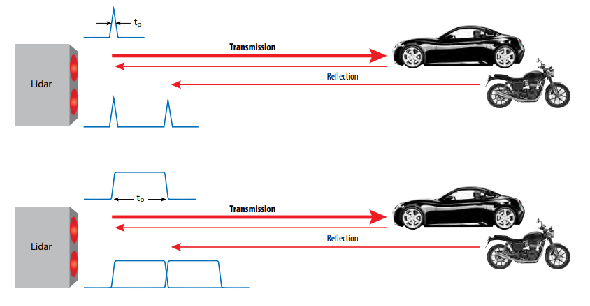
脉冲激光脉宽越短,单位时间内能够被激光雷达有效接收并处理的脉冲激光数就越多,所得到的3D影像的分辨率就越高。图中上半部分,由于是窄脉冲,每一次反射都能被接收并处理;下半部分,由于宽脉冲间互相重叠难以区分使得激光雷达分辨率降低。

激光雷达通过感应脉冲发射并返回所需的时间来测量物体的距离,从而创建 3D 图像。由于光速约为0.3 m/ns,系统中每纳秒的误差会导致距离测量产生0.3m的误差。车辆在高速公路上行驶时,为了确定附近的物体是否会对车辆构成威胁,激光雷达需要具有足够的分辨率,这要求驱动电路的电流必须在大约1ns内上升到其峰值,延迟时间,切换时间,导通时间等尽可能的低,并且需要以极高的精度重复产生这一脉冲激光。GaN FET由于其作为激光二极管开关器件具有高功率及高功率密度的优点使其成为车载固态激光雷达的优选。但是也因为GaN FET对寄生参数的敏感、高频条件下栅极电压易产生振荡等原因,对驱动电路有着很高的要求。
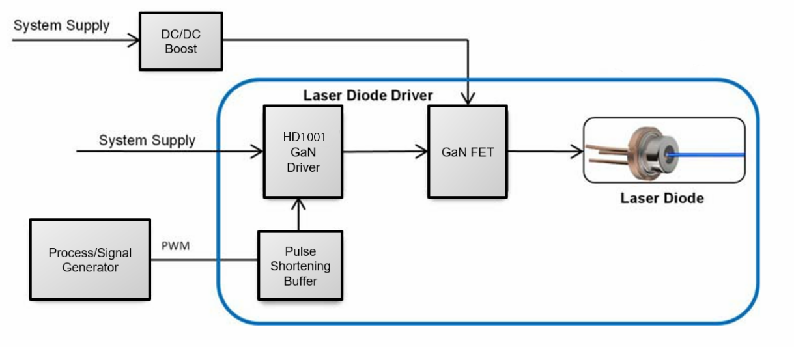
典型激光雷达应用参考设计的框图如上图所示,经过脉宽调制与缓冲的输入信号给到驱动器以驱动GaN FET并输出纳秒级别宽度的脉冲,关键的器件包括缓冲器、栅极驱动器、GaN FET以及激光二极管,高频条件下工作的驱动器可以驱动GaN FET产生多个用于探测连续脉冲激光。发射端通常使用低侧栅极驱动器,HD1001型超高速GaN FET驱动器十分适合应用与驱动激光雷达发射端中的GaN FET,能够驱动GaN FET产生脉冲宽度小于2ns、功率超过100 W的脉冲激光,因此非常适合激光雷达应用。
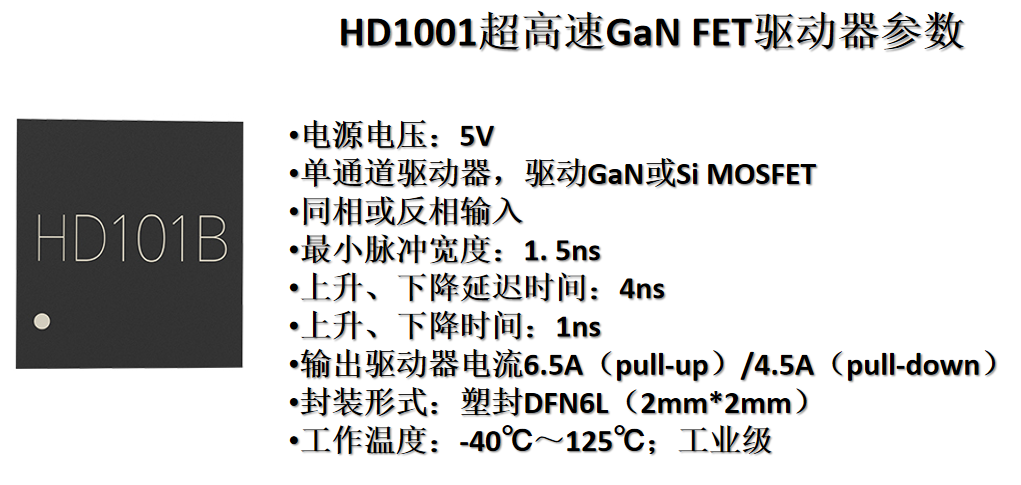
乾鸿微HD1001型超高速GaN FET驱动器具有快速开关频率、低延迟、窄脉宽、低失真以及驱动能力强等特性,快速开关频率提升了探测距离与精度;低延迟改善了控制环路响应时间;驱动能力强则减少了对激光器功率的限制,提升了设计灵活性。此外HD1001具有欠压锁定(UVLO)和过温保护(OTP),以确保设备在意外故障情况下的安全性;采用2*2mm小尺寸紧凑封装,有助于减小寄生电感,缩减激光雷达发射机尺寸。
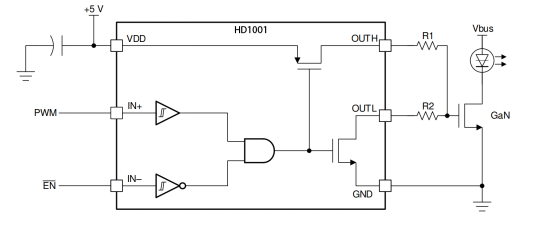
以上产品应用图IN+和IN-引脚处有两个施密特触发器以降低输入极对噪声的敏感性,两个输出端OUH与OUTL可以使用独立电阻连接至栅极,用户可通过调整这两个电阻来控制开启与关断的驱动能力以控制栅极信号的振铃。在实际设计过程中,栅极驱动器与GaN FET之间距离要尽可能短,栅极回路也要尽可能小,以避免振铃产生;如果振铃不可避免,则应选择使振铃最小的栅极电阻。HD1001的VDD脚应接一0.1uF~1uF的旁路电容用于滤波,走线要宽并尽可能贴近HD1001。除应用于车载激光雷达的发射端之外,HD1001型超高速GaN FET驱动器也可以用于以下领域:
面部识别
E 类无线充电器
VHF 谐振电源转换器
基于 GaN 的同步整流器
扩增实境(AR)
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。