51单片机上实现控制跑马灯
在MCS一51单片机的控制系统中,它的四个并行8位输入输出端口P0一P3是我们经常使用的。在并行端口的编程学习中,“跑马灯”是单片机并行端口输出控制的典型实例。所谓跑马灯,是指将八个发光二极管分别连接到单片机的某一并行端口的八根线上,通过编程控制这八个发光二极管从低到高或从高到低依次点亮。
如图1所示,将8个发光二极管阴极接到MCS一51单片机P1端口的8根端口线上,阳极通过限流电阻接+5V电源。要让发光二极管点亮,则对应的端口线应该为低电平(‘’0’);而要让其熄灭,对应的端I=I线应该为高电平(“1”)。由此,我们假定“跑马灯”由端I=1的低位向高位轮流点亮.可以得到如下状态:
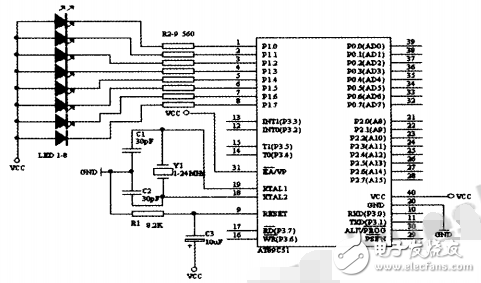
图1 跑马灯电路图
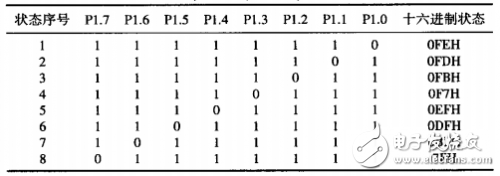
表1 跑马灯状态表
从表1可以看出,P1端口的状态共有8种,在“跑马灯”的显示过程中.这8种状态依次出现,循环往复。而要实现“跑马灯”的这种 显示功能.我们可以采用三种方法:
(1)穷举法;
(2)移位法;
(3)查表法。
下面分别来介绍一下这三种方法。
一、穷举法
对于单片机的显示状态来说,它的8种状态是循环显示的。所谓穷举法。是指将单片机所有的显示状态全部列举出来。写在程序的主函数中,通过while(1)的死循环来实现这些状态的循环显示。
程序如下:
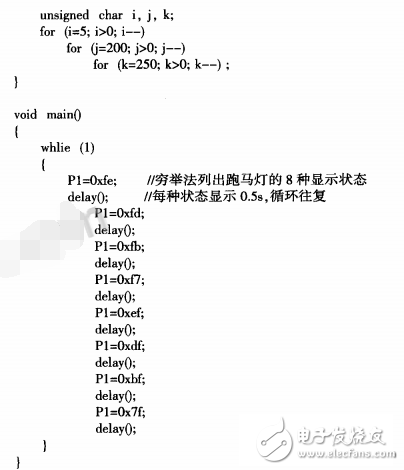
通过上述程序可以看出,穷举法程序结构简单。直接将所有需要的状态在主函数中全部列举出来即可。
二、移位法
通过观察表一中列出的跑马灯8种状态,从0FEH变化到7FH。这些状态从二进制来看,始终是保持7个“1”,1个“0”;并且“0”的位置从最低位依次移动到最高位,每次向左移动一位。当‘0’移动到最高位后,又重新从最低位开始。
在C语言中,我们学习过位操作运算符。在位操作运算符中,有专门的二进制移位运算符。其中,“<<”运算符表示将二进制数左移, “>>”运算符表示将二进制数右移。不管是左移还是右移,移出来的空位补0。但是,我们观察跑马灯的8种状态可以看出,在“0’向左移动的过程中,移位空出来的状态是补1,这样保证始终是7个“1”,1个“0”。所以,在这里直接对最终显示的状态进行左移操作显然是不行的。由此,我们考虑将初始数据变成7个“0”,1个”1”,对初始数据进行左移,左移之后再取反,即可变成7个“1”,1个“0”的显示状态,从而实现跑马灯功能。如表2所示。
比较表1和表2的状态.可以看出采用先对初始状态移位再取反的方式.可以得到想要的跑马灯8种状态,从而实现跑马灯的显示。
程序如下:
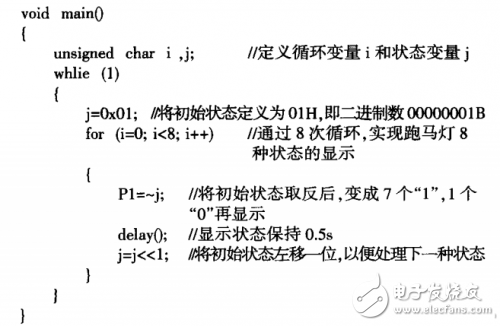
通过上述程序可以看出.移位法通过对二进制数进行移位之后再取反的方式来得到跑马灯的状态,并将其送端口实现跑马灯的显示。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。