本章开始,先新建一个基于野火STM32全系列(包含M3/4/7)开发板的的RT-Thread的工程模板,让RT-Thread先跑起来。以后所有的RT- Thread相关的例程我们都在此模板上修改和添加代码,不用再反反复复地新建。
获取STM32的裸机工程模板
STM32的裸机工程模板我们直接使用野火STM32开发板配套的固件库例程即可。这里我们选取比较简单的例 程—“GPIO输出—使用固件库点亮LED”作为裸机工程模板。该裸机工程模板均可以在对应板子的A盘/程序源码 /固件库例程的目录下获取到,下面以野火F103-霸道板子的光盘目录为例,具体见图 STM32裸机工程模板在光盘资料中的位置。
2. 下载RT-Thread Nano 源码
Nano是Master的精简版,去掉了一些组件和各种开发板的BSP,保留了OS的核心功能,但足够我们使用。版本已经更新到了3.0.3版本,与Master的版本号一致。
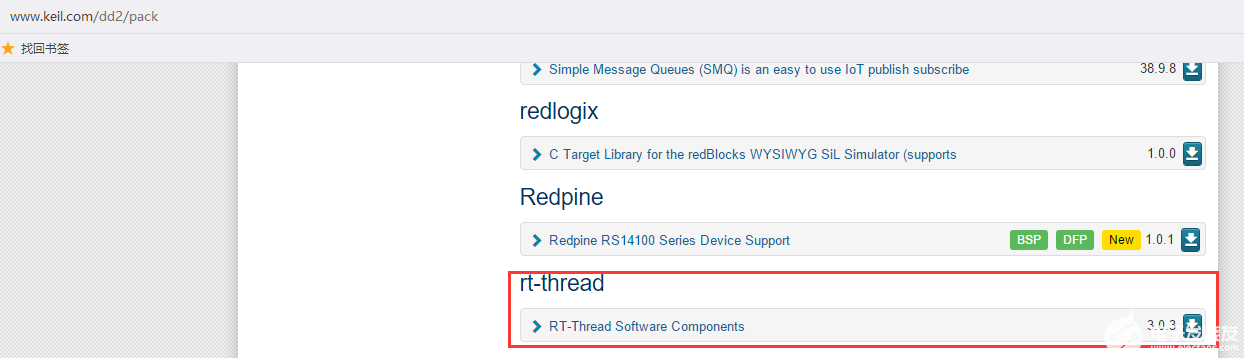
RT-Thread Master的源码可从RT-Thread GitHub仓库地址:https://github.com/RT-Thread/rt-thread下载到,Nano就是从里面扣出来的。RT- Thread官方并没有将抠出来的Nano放到他们的官方网站,而是作为一个Package放在了KEIL网站—http://www.keil.com/dd2/pack/中,供用户下载, 具体见图 RT-Thread Nano Package,目前的版本号是3.0.3,如果以后更新到更高的版本则以最新的版本为准。
3. 安装RT-Thread Package
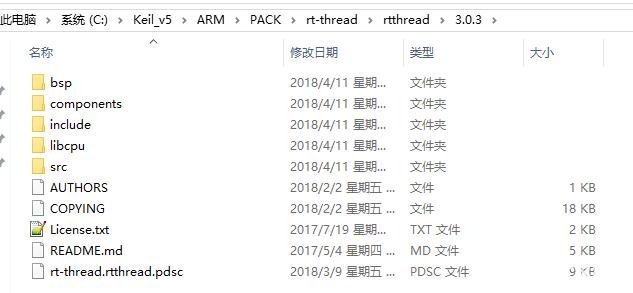
下载下来之后是一个以exe为后缀的文件,点击安装即可,安装目录与你的KEIL安装目录一样,安装成功之后, 可以在KEIL的PACK目录下找到刚刚安装的Package的所有的文件,具体见图 安装文件。
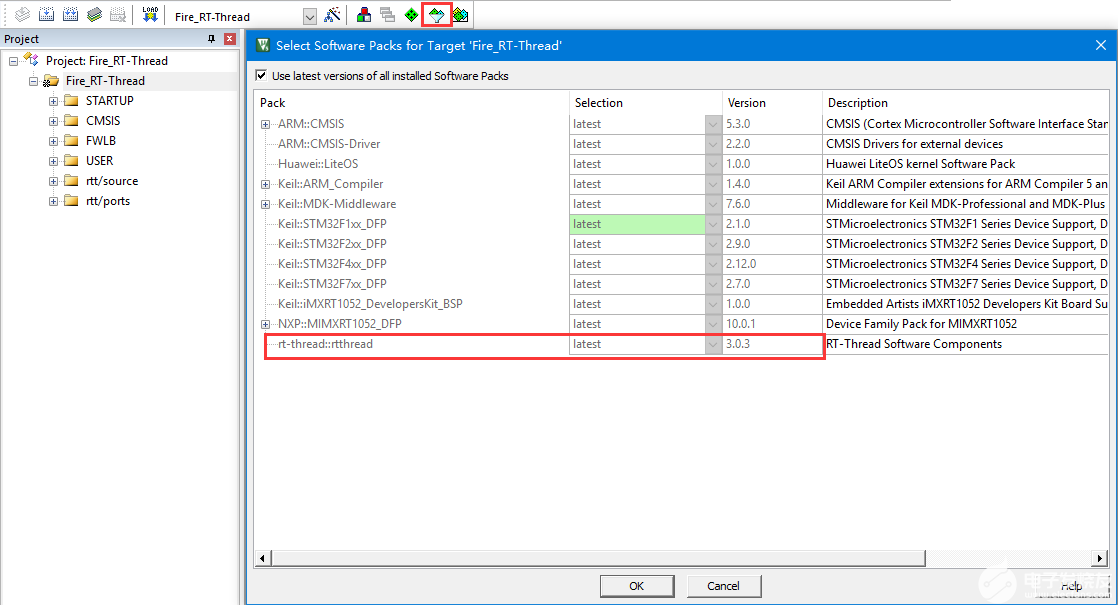
这样安装成功之后,就可以在KEIL里面的软件包管理器中将RT-Thread Nano 直接添加到工程里面, 具体见图 从KEIL的软件包管理器中选择RT-Thread。
4. 往裸机工程添加RT-Thread源码
4.1. 拷贝RT-Thread Package到裸机工程根目录
使用这种方法打包的RT-Thread 工程,拷贝到一台没有安装RT-Thread Package的电脑上面是使用不了的, 会提示找不到RT-Thread的源文件。鉴于RT-Thread Package容量很小,我们直接将安装在KEIL PACK 目 录下的整个RT-Thread文件夹拷贝到我们的STM32裸机工程里面,让整个RT-Thread Package 跟随我们的 工程一起发布,具体见图 拷贝Package到裸机工程。
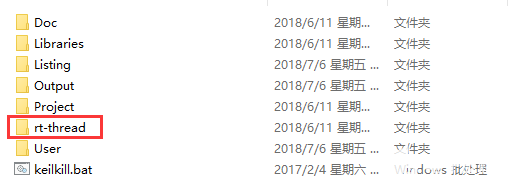
图 拷贝Package到裸机工程 中RT-Thread文件夹下就是RT-Thread Nano 的所有东西,该文件夹下的具体内容见下表。
表格 RT-dhread 文件夹内容组成
文件夹 |
文件夹 |
描述 |
|---|---|---|
rtthread/3.0.3 |
bsp |
板级支持包 |
components/finsh |
RT-Thread组件 |
|
include |
头文件 |
|
include/libc |
头文件 |
|
libcpu/arm/cortex-m0 |
与处理器相关的接口文件 |
|
libcpu/arm/cortex-m3 |
与处理器相关的接口文件 |
|
libcpu/arm/cortex-m4 |
与处理器相关的接口文件 |
|
libcpu/arm/cortex-m7 |
与处理器相关的接口文件 |
|
src |
RT-Thread内核源码 |
4.2. 拷贝rtconfig.h文件到user文件夹
将RT-Thread/3.0.3/bsp文件夹下面的rtconfig.h配套文件拷贝到工程根目录下面的user文件夹,等下我们需要对这个文件进行修改。
用户可以通过修改这个RT-Thread内核的配置头文件来裁剪RT-Thread的功能,所以我们把它拷贝一份放在user这个文件夹下面。user,见名之义我们就可以知道里面存放的文件都是用户自己编写的。
4.3. 拷贝board.c文件到user文件夹
将RT-Thread/3.0.3/bsp文件夹下面的board.c配套文件拷贝到工程根目录下面的user文件夹,等下我们需要对这个board.c进行修改。
4.4. RT-Thread文件夹内容简介
接下来我们对RT-Thread文件夹下面的内容做个简单的介绍,好让我们能够更顺心地使用RT-Thread。
4.4.1. bsp文件夹简介
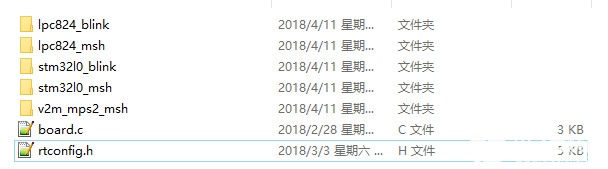
bsp文件夹里面存放的是板级支持包,即board support package的英文缩写。RT-Thread为了推广自己, 会给各种半导体厂商的评估板写好驱动程序,这些驱动程序就放在bsp这个目录下,我们这里用的是nano版本, 只有几款开发板的驱动,具体见图 bsp文件夹内容,如果是Master版本,则存放了非常多的开发板的驱动,具体见 图 Master文件夹内容。bsp文件夹下面的board.c这是RT-Thread用来初始化开发板硬件的相关函数。rtconfig.h是 RT-Thread功能的配置头文件,里面定义了很多宏,通过这些宏定义,我们可以裁剪RT-Thread的功能。 用户在使用RT-Thread的时候,用户只需要修改board.c和rtconfig.h这两个文件的内容即可,其它文件 我们不需要改动。如果为了减小工程的大小,bsp文件夹下面除了board.c和rtconfig.h这两个文件要保 留外,其它的统统可以删除。
4.4.2. components文件夹简介
在RT-Thread看来,除了内核,其它第三方加进来的软件都是组件,比如gui、fatfs、lwip和finsh等。那么这些组件就放在components这个文件夹内,目前nano版本只放了finsh,其它的都被删除了,master版本则放了非常多的组件。finsh是RT- Thread组件里面最具特色的,它通过串口打印的方式来输出各种信息,方便我们调试程序。
4.4.3. include文件夹简介
include目录下面存放的是RT-Thread内核的头文件,是内核不可分割的一部分。
4.4.4. libcpu文件夹简介
RT-Thread是一个软件,单片机是一个硬件,RT- Thread要想运行在一个单片机上面,它们就必须关联在一起,那么怎么关联?还是得通过写代码来关联,这部分 关联的文件叫接口文件,通常由汇编和C联合编写。这些接口文件都是跟硬件密切相关的,不同的硬件接口文件是 不一样的,但都大同小异。编写这些接口文件的过程我们就叫移植,移植的过程通常由RT-Thread和mcu原厂的人 来负责,移植好的这些接口文件就放在libcpu这个文件夹的目录下。RT-Thread nano目 前在libcpu目录下只放了cortex-m0、m3、m4和m7内核的单片机的接口文件,只要是使用了这些内核的mcu都可 以使用里面的接口文件。通常网络上出现的叫“移植某某某RTOS到某某某MCU”的教程,其实准确来说,不能够叫 移植,应该叫使用官方的移植,因为这些跟硬件相关的接口文件,RTOS官方都已经写好了,我们只是使用而已。 我们本章讲的移植也是使用RT-Thread官方的移植,关于这些底层的移植文件我们已经在第一部分“从0到1教你 写RT-Thread内核”有非常详细的讲解,这里我们直接使用即可。
4.4.5. src文件夹简介
src目录下面存放的是RT-Thread内核的源文件,是内核的核心,我们在第一部分“从0到1教你写RT-Thread内核”里面讲解的就是这里面内容。
4.5. 添加RT-Thread源码到工程组文件夹
在上一步我们只是将RT-Thread的源码放到了本地工程目录下,还没有添加到开发环境里面的组文件夹里面。
4.5.1. 新建rtt/source和rtt/ports组
接下来我们在开发环境里面新建rtt/source和rtt/ports两个组文件夹,其中rtt/source用于存放src文件夹的内容,rtt/ports用于存放libcpu/arm/cortex-m?文件夹的内容,“?”表示3、4或者7,具体选择哪个得看你使用的是野火哪个型号的STM32开发板,具体 见下表。
表格 野火STM32开发板型号对应RT-Thread的接口文件
野火STM32开发板型号 |
具体芯片型号 |
RT-Thread不同内核的接口文件 |
|---|---|---|
MINI |
STM32F103RCT6 |
libcpu/arm/cortex-m3 |
指南者 |
STM32F103VET6 |
libcpu/arm/cortex-m3 |
霸道 |
STM32F103ZET6 |
libcpu/arm/cortex-m3 |
霸天虎 |
STM32F407ZGT6 |
libcpu/arm/cortex-m4 |
F429-挑战者 |
STM32F429IGT6 |
libcpu/arm/cortex-m4 |
F767-挑战者 |
STM32F767IGT6 |
libcpu/arm/cortex-m7 |
H743-挑战者 |
STM32H743IIT6 |
libcpu/arm/cortex-m7 |
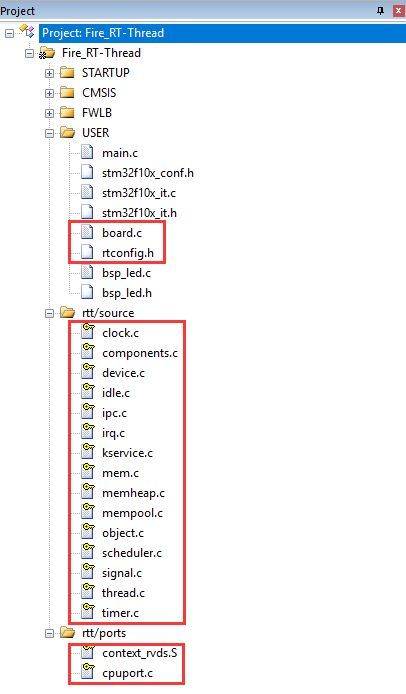
bsp里面的rtconfig.h和board.c添加到user组文件夹下,其中rtconfig.h用于配置RT-Thread的功能, board.c用于存放硬件相关的初始化函数。源码添加完毕之后,具体见图 添加RT-Thread源码到工程组文件夹。
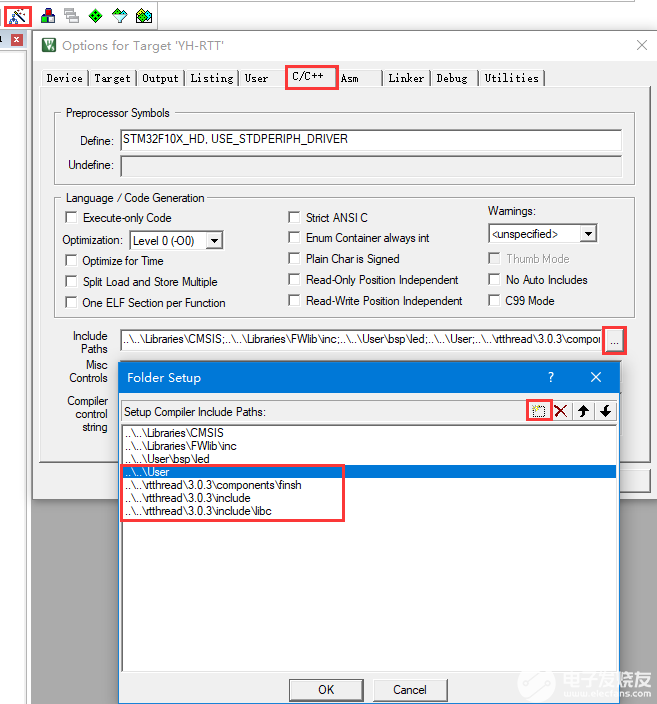
2.4.5.2. 指定RT-Thread头文件的路径
RT-Thread的源码已经添加到开发环境的组文件夹下面,编译的时候需要为这些源文件指定头文件的路径,不然编译会报错。RT-Thread的源码里面只有RT-Thread3.0.3componentsfinsh、RT-Thread3.0.3include和RT- Thread3.0.3includelibc这三个文件夹下面有头文件,只需要将这三个头文件的路径在开发环境里面指定即可。同时我们还将RT-Thread3.0.3bsp里面的rtconfig.h这个头文件拷贝到了工程根目录下的user文件夹下,所以user的路径也要加到开发环境里面。RT- Thread头文件的路径添加完成后的效果具体见图 在开发环境中指定RT-Thread的头文件的路径。
2.5. 修改rtconfig.h
rtconfig.h是直接从RT-Thread/3.0.3/bsp文件夹下面拷贝过来的,该头文件对裁剪整个RT-Thread所需的功能的宏均做了定义,有些宏定义被使能,有些宏定义被失能,一开始我们只需要配置最简单的功能即可。要想随心所欲的配置RT- Thread的功能,我们必须对这些宏定义的功能有所掌握,下面我们先简单的介绍下这些宏定义的含义,然后再对这些宏定义进行修改。
2.5.1. rtconfig.h文件内容讲解
代码清单:移植RTT-1 (1) :头文件RTE_Components.h是在MDK中添加RT-Thead Package时由MDK自动生成的, 目前我们没有使用MDK中自带的RT-Thread的Package,所以这个头文件不存在,如果包含了该头文件,编译的时 候会报错,等下修改rtconfig.h的时候需要注释掉该头文件。
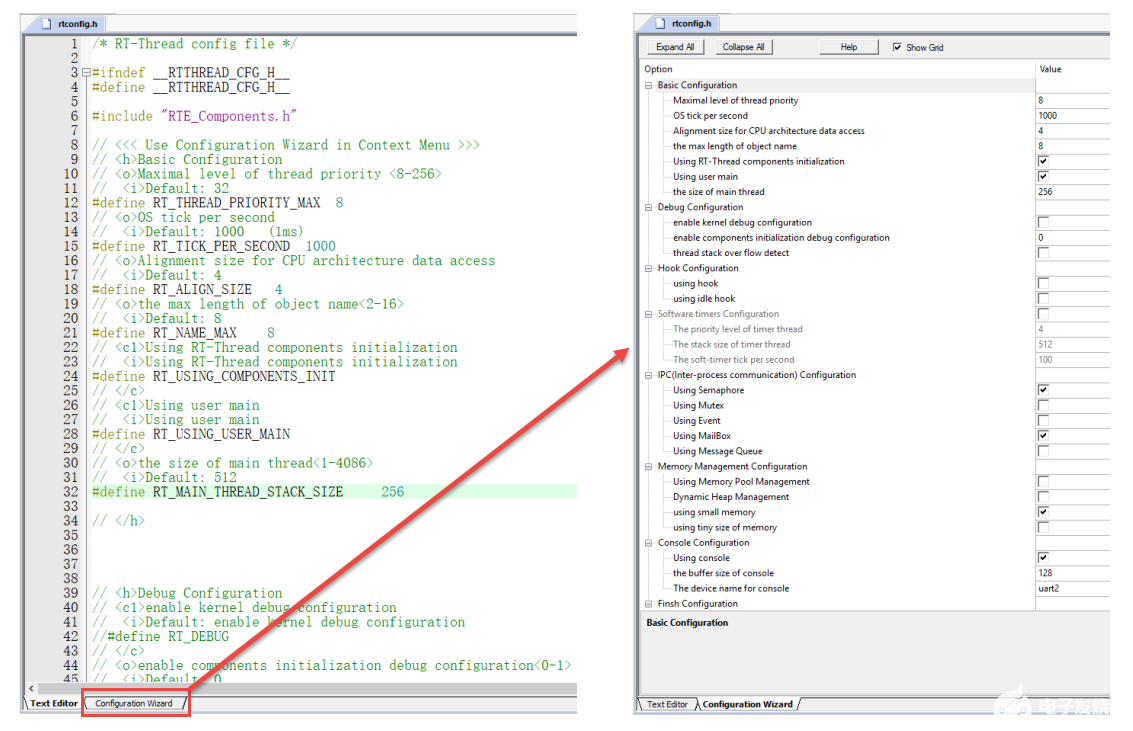
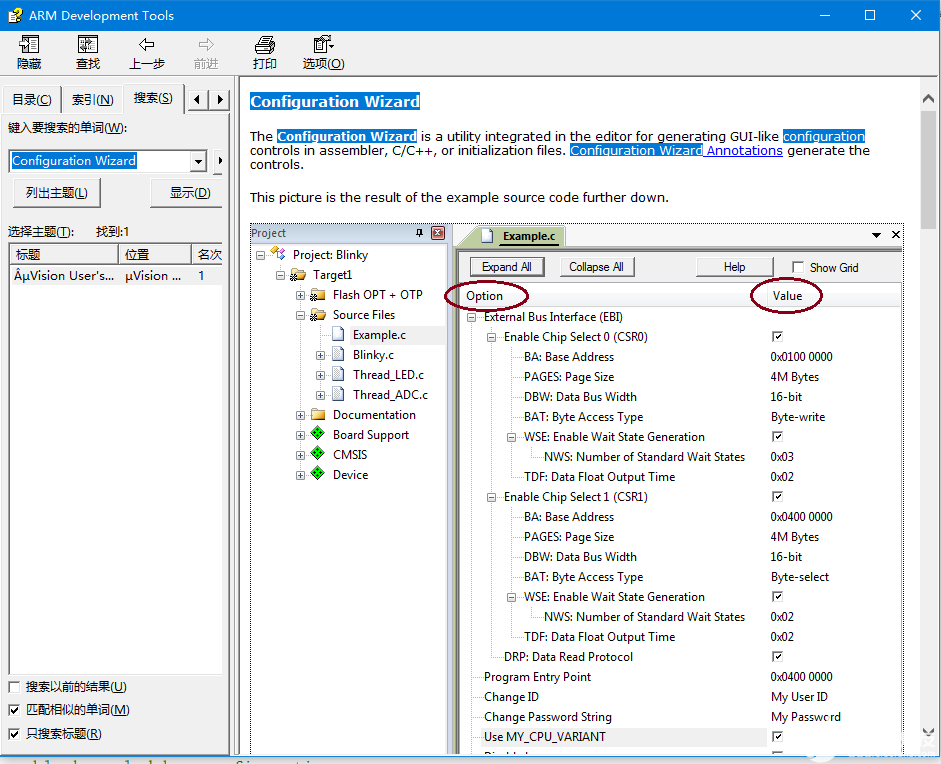
代码清单:移植RTT-1 (2) : Use Configuration Wizard in Context Menu: 在上下文中使用 配置向导来配置rtconfig.h中的宏定义。接下来代码中夹杂的“”、“”“”、“”和“”这些符号是MDK自带的配置向导控制符号,使用这些符号控制的代码可以生成一个对应的图形界面的配置 向导,rtconfig.h对应的配置向导具体见图 rtconfig.h对应的配置向导。有关配置向导的语法,可在MDK的帮助文档里面找到, 在搜索栏输入Configuration Wizard 即可搜索到,具体见图 Configuration-Wizard。具体每一个符号的语法我们这里不 做细讲,有兴趣的可以深究下。 对于我个人,还是倾向于直接修改rtconfig.h中的源码,而不是通过这个配置 向导来修改,就好比一个老烟枪抽烟的时候你要给他加个过滤嘴,那是不可能的,这辈子都是不可能的。
代码清单:移植RTT-1 (3) :RT-Thread的基本配置,要想RT-Thread准确无误的跑起来,这些基本配置必须得有且正确。
代码清单:移植RTT-1 (3)-1 :RT_THREAD_PRIORITY_MAX这个宏表示RT-Thread支持多少个优先级, 取值范围为8~~~256,默认为32。
代码清单:移植RTT-1 (3)-2:RT_TICK_PER_SECOND 表示操作系统每秒钟有多少个tick,tick即是操 作系统的时钟周期,默认为1000,即操作系统的时钟周期tick等于1ms。
代码清单:移植RTT-1 (3)-3:RT_ALIGN_SIZE这个宏表示CPU处理的数据需要多少个字节对齐,默认为4个字节。
代码清单:移植RTT-1 (3)-4:RT_NAME_MAX这个宏表示内核对象名字的最大长度,取值范围为2~~~16,默认为8。
代码清单:移植RTT-1 (3)-5:使用RT-Thread组件初始化,默认使能。
代码清单:移植RTT-1 (3)-6:使用用户main函数,默认打开。
代码清单:移植RTT-1 (3)-7:main线程栈大小,取值范围为1~~~4086,单位为字节,默认为512。
代码清单:移植RTT-1 (4):调试配置。包括了内核调试配置,组件调试配置和线程栈溢出检测,目前全部关闭。
代码清单:移植RTT-1 (5):钩子函数配置,目前全部关闭。
代码清单:移植RTT-1 (6):软件定时器配置,目前关闭,不使用软件定时器。
代码清单:移植RTT-1 (7):内部通信配置,包括信号量、互斥量、事件、邮箱和消息队列,根据需要配置。
代码清单:移植RTT-1 (8):内存管理配置。
代码清单:移植RTT-1 (8)-1:RT_USING_MEMPOOL这个宏用于表示是否使用内存池,目前关闭,不使用内存池。
代码清单:移植RTT-1 (8)-2:RT_USING_HEAP这个宏用于表示是否堆,目前关闭,不使用堆。
代码清单:移植RTT-1 (8)-3:RT_USING_SMALL_MEM这个宏用于表示是否使用小内存,目前使能。
代码清单:移植RTT-1 (8)-4:RT_USING_TINY_SIZE这个宏用于表示是否使用极小内存,目前关闭,不使用。
代码清单:移植RTT-1 (9):控制台配置。控制台即是rt_kprintf()函数调试输出的设备,通常使用串口。
代码清单:移植RTT-1 (10):FINSH配置。
代码清单:移植RTT-1 (11):设备配置。
代码清单:移植RTT-1 (12):rtconfig.h配置结束。
2.5.2. rtconfig.h文件修改
rtconfig.h头文件的内容修改的不多,具体是:注释掉头文件RTE_Components.h、修改了 RT_THREAD_PRIORITY_MAX、RT_TICK_PER_SECOND和RT_MAIN_THREAD_STACK_SIZE这三个宏 的大小,具体见 代码清单:移植RTT-2 的高亮部分。
2.6. 修改board.c
2.6.1. board.c文件内容讲解
board.c是直接从RT-Thread/3.0.3/bsp文件夹下面拷贝过来的,里面存放的是与硬件相关的初始化函数, 整个 board.c中的内容具体见 代码清单:移植RTT-3。
代码清单:移植RTT-3 (1):RT-Thread相关头文件,rthw.h是处理器相关,rtthread与内核相关。
代码清单:移植RTT-3 (2):SysTick相关的寄存器定义和初始化函数,这个是跟处理器相关的,等下我们直接 使用固件库函数,可以把这部分注释掉,也可以保留,看个人喜好。
代码清单:移植RTT-3 (3):RT-Thread堆配置,如果同时定义了RT_USING_USER_MAIN和 RT_USING_HEAP这两 个宏,表示RT-Thread里面创建内核对象时使用动态内存分配方案。堆可以是内部的SRAM也可以是外部的SRAM或 SDRAM,目前的方法是从内部SRAM里面分配一部分静态内存来作为堆空间,这里配置为4KB。rt_heap_begin_get() 和rt_heap_end_get()这两个函数表示堆的起始地址和结束地址。这两个函数前面的宏RT_WEAK的原型是关键字 __weak,表示若定义,即其它地方定义了rt_heap_begin_get()和rt_heap_end_get()这两个函数实体, 被__weak修饰的函数就会被覆盖。
RT_USING_USER_MAIN和RT_USING_HEAP这两个宏在rtconfig.h中定义,RT_USING_USER_MAIN默认使能,通过使能或者失能RT_USING_HEAP这个宏来选择使用静态或者动态内存。无论是使用静态还是动态内存方案,使用的都是内部的SRAM,区别是使用的内存是 在程序编译的时候分配还是在运行的时候分配。
2.6.1.1. rt_hw_board_init()函数
代码清单:移植RTT-3 (4):RT-Thread启动的时候会调用一个名为rt_hw_board_init()的函数,从函数名称 我们可以知道它是用来初始化开发板硬件的,比如时钟,比如串口等,具体初始化什么由用户选择。当这些硬件 初始化好之后,RT-Thread才继续往下启动。至于RT-Thread是哪个文件里面的哪个函数会调 用rt_hw_board_init(),我们在本章先不细讲,留到接下来的“RT-Thread的启动流程”章节再深究,这里我们 只需要知道我们用户要自己编写一个rt_hw_board_init()的函数供RT-Thread启动的时候调用即可。
代码清单:移植RTT-3 (4)-1:更新系统时钟,如果硬件已经能够跑起来都表示系统时钟是没有问题的,该函数一般由固件库提供。
代码清单:移植RTT-3 (4)-2:初始化系统定时器SysTick,SysTick给操作系统提供时基,1个时基我们称之 为一个tick,tick是操作系统最小的时间单位。RT_TICK_PER_SECOND是一个在rtconfig.h中定义的宏,用于 配置SysTick每秒中断多少次,这里配置为1000,即1秒钟内SysTick会中断1000次,即中断周期为1ms。 这部 分功能等下我们会用固件库函数SysTick_Config()来代替。
代码清单:移植RTT-3 (4)-3:硬件BSP初始化统统放在这里,比如LED,串口,LCD等。目前我们暂时没有初始化任何开发板的硬件。
代码清单:移植RTT-3 (4)-4:这部分是RT-Thread为开发板组件提供的一个初始化函数,该函数在 components.c里面实现,由rtconfig.h里面的宏RT_USING_COMPONENTS_INIT决定是否调用,默认是开启。
代码清单:移植RTT-3 (4)-5:rt_console_set_device()是RT-Thread提供的一个控制台设置函数,它将指定rt_kprintf()函数 的输出内容具体从什么设备打印出来。该函数在kservice.c里面实现,由rtconfig.h里面的RT_USING_CONSOLE和RT_USING_DEVICE这两个宏决定是否调用,目前我们暂时不用。
代码清单:移植RTT-3 (4)-6:rt_system_heap_init()是RT-Thread提供的一个内存初始化函数, 只有在使用RT-Thread提供的动态内存分配函数时才需要使用到。该函数在mem.c里面实现,由rtconfig.h里面的RT_USING_HEAP和RT_USING_USER_MAIN这两个决定是否调用,目前我们暂时不用。
2.6.1.2. SysTick_Handler()函数
代码清单:移植RTT-3 (5):SysTick中断服务函数是一个非常重要的函数,RT-Thread所有跟时间相关的事 情都在里面处理,具体实现见 代码清单:移植RTT-4。
代码清单:移植RTT-4 SysTick_Handler()函数
代码清单:移植RTT-4 (1):进入中断,对中断计数器rt_interrupt_nest加1操作。
代码清单:移植RTT-4(2):rt_tick_increase()用于更新时基,实现时间片,扫描系统定时器。
代码清单:移植RTT-4(3) :退出中断,对中断计数器rt_interrupt_nest减1操作。
2.6.2. board.c文件修改
board.c文件内容修改的并不多,具体见代码清单:移植RTT-5的高亮部分。
代码清单:移植RTT-5 修改(1):在user目录下新建一个board.h头文件,用来包含固件库和BSP相关的 头文件和存放board.c里面的函数声明,具体见 代码清单:移植RTT-6。
代码清单:移植RTT-5 修改(2):SysTick相关的寄存器和初始化函数统统屏蔽掉,将由固件库文件core_cm3/4/7里面的替代。
代码清单:移植RTT-5 修改(3):SysTick初始化函数由固件库文件core_cm3/4/7里面的SysTick_Config()函数替代。
如果使用的是HAL库(目前野火只在STM32 M7系列中使用HAL库),则必须添加系统时钟初始化函数,这个函数在 我们利用STM32CubeMX代码生成工具配置工程时会自动给我们生成,我们只需添加到rt_hw_board_init()函数进 行初始化即可。
代码清单:移植RTT-7 (2):初始化系统时钟之后,需要对SysTick进行初始化,因为系统时钟初始化函数会 在最后将SysTick的时钟也进行初始化为HAL库中默认的时钟,不满足我们系统的要求,所以我们只能使用 HAL_SYSTICK_Config将SysTick重新初始化,根据我们的RT_TICK_PER_SECOND宏定义进行配置。保证系统正常运行。
2.7. 添加core_delay.c和core_delay.h文件
只有在使用HAL库时才需要添加core_delay.c和core_delay.h文件。野火只在其M7系列的开发板使用了HAL,M4和M3使用的是标准库,不需要添加。
在ST的Cortex-M7内核系列的单片机中,就不再支持标准库而是推出了HAL库,目前,野火只在STM32 M7系列中使用HAL库。
HAL是意思是HardwareAbstractionLayer,即硬件抽象层。用一句话概括就是现在这个库与标准库相比,与底 层硬件的相关性大大地降低,程序可移植性大大提高,电工写程序更easy,可以像计算机的码农那样写代码。对于 小白来说,Coding的门槛虽然降低了,但是HAL带来的占用内存大,编译慢是很多老手不喜欢的,特别是我,我就 很不喜欢,编译一次7分钟,简直是要了我的老命。鉴于HAL的优缺点,我个人观点是比较适合ST Cortex-M7内核 系列这种大内存,高性能的MCU,虽然Cortex-M3/M4也有HAL库,但是还是使用标准库比较好。
HAL库驱动中,由于某些外设的驱动需要使用超时判断(比如I2C、SPI、SDIO等),需要精确延时(精度为1ms), 使用的是SysTick,但是在操作系统里面,我们需要使用SysTick来提供系统时基,那么就冲突了,怎么办?我们 采取的做法是重写HAL库里面延时相关的函数,只有三个:HAL_InitTick()、HAL_GetTick()和HAL_Delay(), 这三个函数在HAL库中都是弱定义函数(函数开头带__weak关键字),弱定义的意思是只要用户重写这三个函数, 原来HAL库里面的就会无效。