基于单片机控制的自主寻迹电动小车的设计
直道检测
在小车的中部平行装有两个色标传感器,采用查询检测的方法对黑线进行检测。89C51在检测到黑线信号后,通过89C51的PI.5和Pl.6口得知是哪一个传感器检测到黑线,以此作为调整小车方向的基准。在程序方面,我们采用了差补控制算法。在校正服务程序中通过检测PI.5和Pl.6口的状态,运用差补算法,精确调节左右前轮的方向,达到使小车稳定沿黑线行走的目的。
为了保证程序的准确性,服务程序中设置了2重黑线检测,有效的防止了小车冲出跑道。在直道上的铁片,我们使用金属探测传感器来检测。通过计算小车开始检测到铁片与离开铁片时的圈数之差,乘以车轮的周长,我们可以得到铁片的长度以及铁片一半的长度,由此可以得到起跑线到铁片中央的距离。
当车轮转动时,安装在轮胎上的磁钢使霍尔元件产生电平变化。因此只需记录电平变化的次数,便能得到实际转速。为了提高准确度,减少误差,我们安装了两块磁钢。
转弯检测
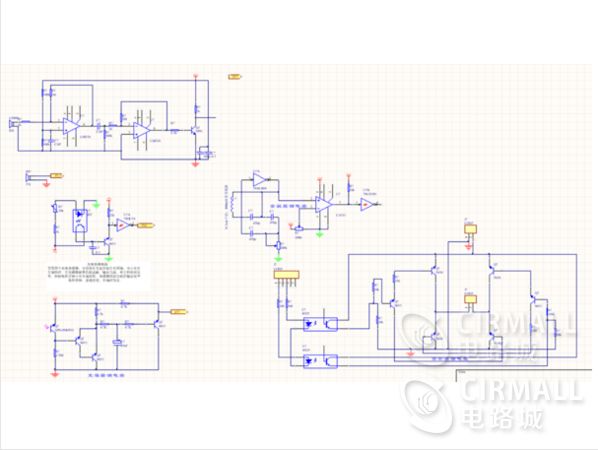
为了防止小车冲出跑道以及按照黑线转弯,需要在进人弯道之前降低速度。因此我们采用了高效的H型PWM电路调节转速。在进人转弯之前,我们通过提前减速程序使小车降低速度。通过跟随黑线行驶和检测最后一片铁片的位置,我们可以得到准确的停车位置和车头方向。在铁片上停留55的期间,驱动声光报警系统,发出声光报警信号;同时,由累计脉冲的总数便可得到全程行驶的时间。
障碍检测
首先我们通过寻找Zoow灯泡的光源,来校正小车的方向。然后通过超声波对障碍物进行距离检测,以此为基准,绕过障碍物。再通过检测光源找到小车与车库之间的距离,并由此引导小车准确进入车库。
结束语
从测试结果来看,PWM技术能够极大地提高电动机的驱动效率;双色标传感器解决了小车严格按照轨迹(黑线)运行的问题;超声波传感器能够精确测量小车与障碍物之间的距离,为躲避障碍物提供了较好的测量方法;霍尔传感器可精确测量运行中的转速。从运行情况看,采用本方案设计制作的智能小车,系统可靠性较高,运行稳定,定位准确,达到了设计要求。

本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。