基于LD3320的语音识别智能垃圾桶设计
1、引言
智能垃圾桶是一种利用自动控制技术、物联网技术为基础,采用微电脑控制芯片、新型传感探测装置和机械传动装置等设备对于传统垃圾桶进行改造发展而来的新型智能家居生活用品。随着物联网技术的发展,各种智能化家居产品顺应市场需求大量出现。这些智能垃圾桶大都基于红外传感探测装置对于靠近的人员所释放的人体热释红外信号进行检测,通过垃圾桶所内置的微电脑控制芯片进行处理,操控机械传统装置,实现非接触式的垃圾桶只能开闭功能。但由于当今红外x热释传感器的传感距离有限,使得大部分垃圾桶的探测距离不足1m,这样的控制距离不能有效的隔绝垃圾桶中的有害病菌的传播途径。
本设计针对当今智能垃圾桶探测距离的不足,利用STC89C52单片机作为系统控制核心,采用由ICRoute公司生产的非特定语音识别芯片LD3320和非特定语音识别算法对于控制语音命令进行识别,实现对于垃圾桶的智能化语音识别控制,完成远距离非接触式智能开闭和系统运动的功能。同时利用超声波测距算法,实现对垃圾桶内部容量的智能提醒。
2、系统组成
本设计主要由数据采集部分、机械驱动部分、主控芯片STC89C52、照明系统和工作状态显示屏几部分组成,系统结构如图1所示。
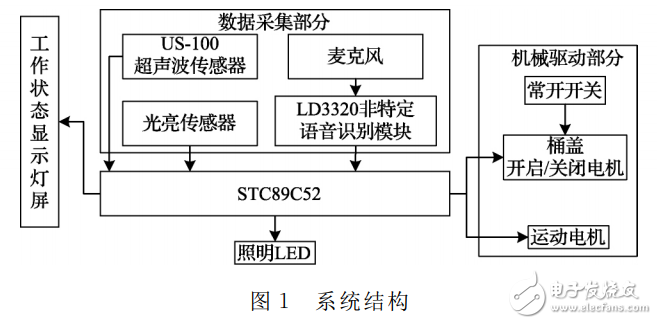
用麦克风采集声音信号,经过滤波、放大处理后送入LD3320非特定语音识别模块进行语音识别处理,处理结果通过串口送入主控芯片STC89C52中[4]。主控芯片通过对于接收自LD3320语音识别芯片的处理结果数据进行分析,对机械驱动部分的电机发出对应操作指令,完成相应的前进、后退、左转、右转、开盖、闭盖等动作,达到在1m距离外对垃圾桶进行语音识别控制的功能[5]。同时利用US-100超声波测距模块对垃圾桶内深度进行测量,主控芯片STC89C52利用中断定时原理,实现对于垃圾桶内容量的监控,并实时的将数据反应在工作状态显示屏上,完成对于垃圾桶容量的智能化管理,提醒用户适时更换清洁垃圾桶。采用光传感器,对于环境亮度进行探测,使得垃圾桶在夜间或低亮度环境下能够启用照明设施,方便用户使用。
3、硬件设计组成
3.1、LD3320非特定语音识别模块
LD3320作为一款基于非特定人语音识别(SI-ASR)技术的语音识别/声控芯片,集成了一系列与其功能相关的外部电路,包括ADC、DAC、麦克风剪口、声音输出接口等,使得LD3320能够在没有任何外接辅助Flash、RAM芯片的情况下直线语音识别/声控/人机对话等功能。且LD3320在工作时,无需进行预先的训练和录音,语音识别率准确率达到了95%,是一款优秀的非特定性语音识别芯片。
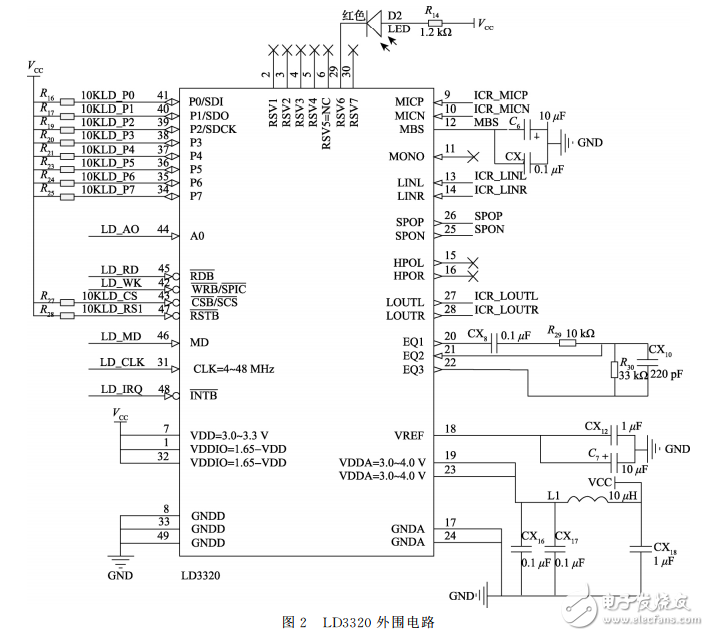
为了让LD3320芯片能够正常工作并且实现与上位单片机的通行,需要为LD3320芯片设计外围电路,电路设计如图2所示。其中红色LED用于指示LD3320芯片的工作状态,当LD3320正常工作时,红色LED将会闪亮。
3.2、电机驱动
本设计需要采用电机实现对于垃圾桶的密闭桶盖的自动开闭和整体设计的各个方向移动,为了能够让作为控制核心的STC89C52单片机能够更好的控制各个运动电机,故需要设计相关的电机驱动电路,本设计采用L289NH桥驱动芯片为核心设计电机驱动电路。
同时保证不会因为电机的堵转等故障所造成的大电流而损坏,需要采用相关的电气隔离措施,本设计采用光耦双隔离措施实现电机驱动和主控STC89C52单片机的电气隔离,使得主控单片机能够正常工作。
3.3、工作状态显示屏及照明模块
为了更好的向用户反映系统的工作状态,方便用户使用,同时实现对于垃圾桶内容量的智能化管理,本设计采用工作状态屏幕实现对于垃圾桶工作状态和剩余容量的及时显示,方便用户查看。同时利用节能环保的高亮LED,从而使得系统能够在夜间或者低亮度条件下使用。
4、软件设计
基于LD3320的智能语音控制垃圾桶系统采用STC89C52单片机作为控制MCU,其系统程序主要分为语音识别、容量探测、电机控制3个部分[8]。系统程序主流程如图3所示。

4.1、LD3320非特定人语音识别流程
LD3320作为一款专门用于非特定人语音识别功能而设计的智能语音识别芯片,内部包含有和语音识别相关的各类功能模块,为了使得LD3320能够正常工作,需要写入相关的驱动程序。LD3320的语音识别的操作顺序是:先进行语音识别的初始化,然后写入识别列表,系统即开始进行语音识别,并准备好中断响应函数,打开中断允许位。在“开始识别”后,读取寄存器B2H的值,如果为21H就表示有识别结果产生。
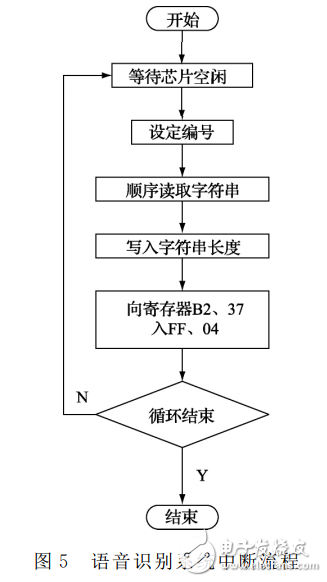
LD3320初始化后是写入识别列表。识别列表的规则是:每个识别条目对应一个特定的编号(1个字节),不同识别条目的编号可以相同,而且不用连续。LD3320芯片最多支持50个识别条目,每个识别条目是标准普通话的汉语拼音(小写),每2个字(汉语拼音)之间用1个空格间隔[7-8]。LD3320语音识别主程序流程如图4所示,语音识别系统中断流程如图5所示。

4.2、电机控制程序流程
由于设计需要完成多种不同类型的动作,需要设计的电机数量较多,因为采用了L298N电机驱动芯片方便控制。

5、验证分析
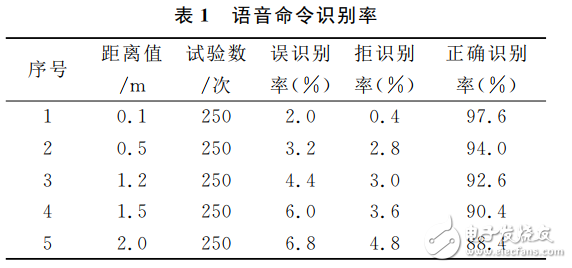
为了验证本设计在正常工作环境下的工作能力,试验采用一个面积为35m2的普通标准声学设计房间作为试验场地对设计的语音识别功能进行了检测。
试验采用电脑以相同音量在不同距离依次播放前进、后退、左转、右转、停止、开启、关闭共7个语音命令,在每个距离上循环播放250次,统计设计的误识别率、据识别率和正确识别率。数据结果如表1所示。
6、结论
设计针对现有智能垃圾桶控制距离不足的问题,提出了采用语音识别算法,采用非特定语音识别芯片LD3320实现远距离智能操控,实验语音控制/识别型智能垃圾桶,有效隔绝病菌传播途径。设计可以实现在2m距离内的远距离语音控制,实现垃圾桶密封桶盖智能开启,垃圾桶全方向移动、智能容量检测显示、夜间低光照明功能。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。