L3、大模型、还是舱驾一体?| 自动驾驶域控制器的来龙去脉(2024版)
来源: 电子工程世界
新闻行业新闻

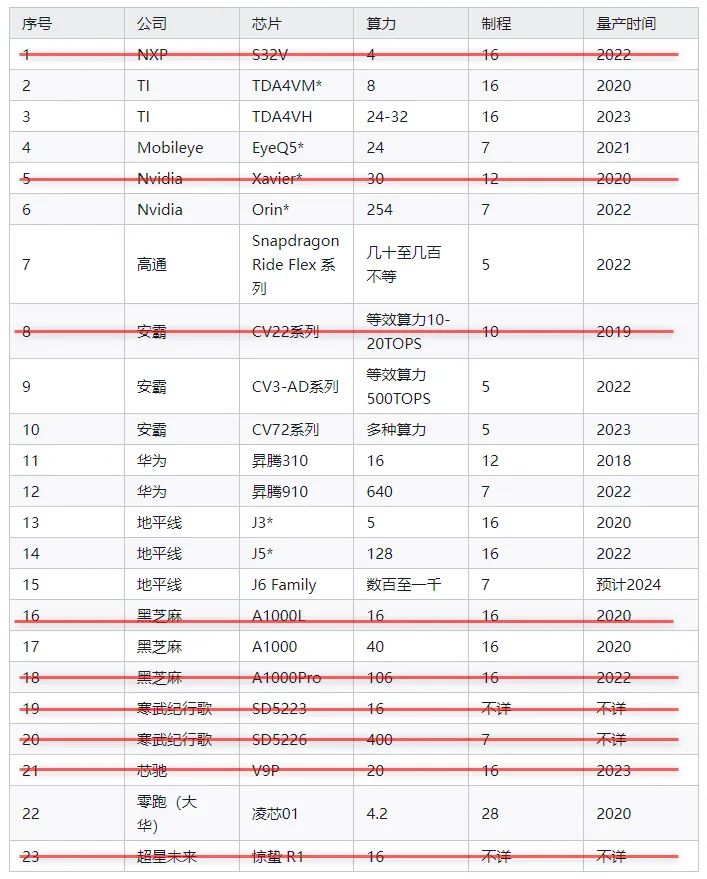








序号 |
公司 |
芯片 |
算力(TOPS) |
制程(nm) |
量产时间 |
拟搭载车型 |
1 |
英伟达 |
Drive Thor |
1000-2000 |
4 |
2025 |
极氪等 |
2 |
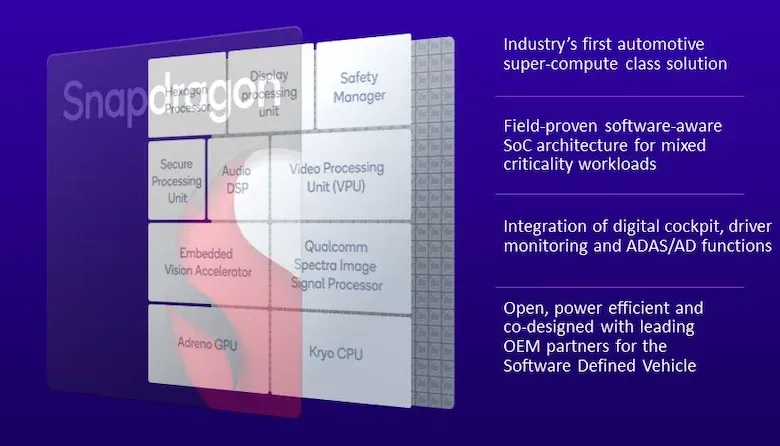
高通 |
SA8775P |
72 |
4 |
2024 |
哪吒 |
3 |
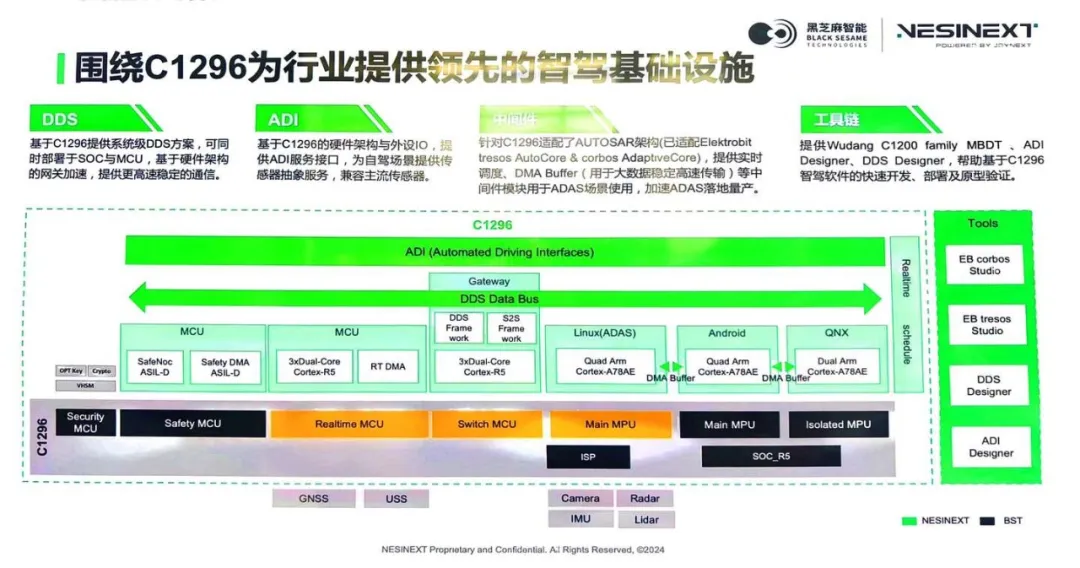
黑芝麻 |
C1296 |
<100 |
7 |
2024 |
未披露 |


特征/市场 |
||||||
不会向支持L3落地的方向发展;
会支持端到端自动驾驶,但这个方向有一定不确定性;
主流方向是支持舱驾一体落地量产。
文章来源于: 电子工程世界原文链接
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。