轮式遥控机器人导航系统电路设计攻略
轮式遥控机器人已经应用在地震、火灾等一些危险的室内区域进行救援和探测,或执行反恐任务。由并且近年来MEMS(微机电系统)结构的惯性传感器随半导体技术的进步得到了迅速发展,使其低成本而高精度的期望得到了实现。MEMS惯性传感器组成的惯性导航装置结合轮式小车的里程计,能够产生导航和定位信息,减少对外部环境的倚赖,实现在外部环境条件(例如光照、墙壁材质)未知情况下的导航,因此本项目采用了具有强大数字信号处理功能的DSP 28335芯片和PC控制终端,实现惯性传感器的数据采集、时序逻辑控制、与驱动系统通信和地图显示功能, 具有体积小、成本低、功耗低等优点。综上所述,本文将选用低成本的MEMS器件,结合DSP和卡尔曼滤波算法,能实现较高精度的轮式小车导航和定位。
系统体系架构
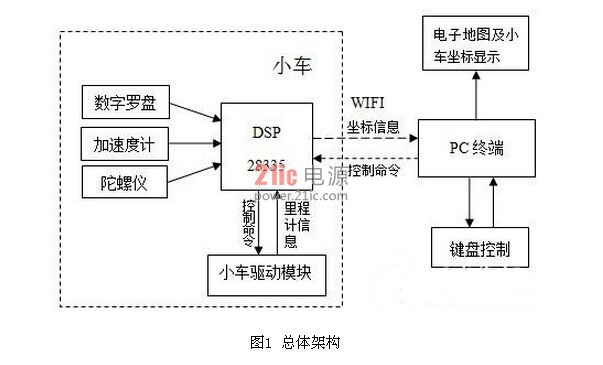
本文的目标是研制一个轮式小车惯性导航系统,能够通过wifi实现PC终端和手持终端控制轮式小车行动以及小车所采集数据的传输。搭建如下图1所示的系统,TI公司的浮点DSPTMS320F28335芯片作为主数字信号处理器,采集各MEMS惯性传感器的信号并处理,处理结果通过WIFI将数据输送到PC终端;PC终端负责显示定位结果和地图显示,并向小车驱动系统发送控制命令,同时接收驱动系统反馈的里程计信息。
硬件设计上,主要分为核心板和驱动板。核心板包括DSP最小系统,JTAG下载口设计,系统电源供给电路和MEMS传感器,WIFI模块等。而驱动板主要设计的内容是直流大电机的驱动模块。TMS320F28335工作时需要的电压不同:内核电压(1.9 V)与I/O供电电压(3.3 V),对于电源比较敏感,所以电源部分利用两路输出电源器件TPS767D318来实现,如图2所示。同时根据仿真实验和实际焊接电路的测试,电源模块输出端最好使用一些容值不小于10uf的保护电容,且不能使用贴片电容,否则工作不稳定。
在电源设计中,考虑到TPS767D318芯片可以产生复位信号,所以在核心板上并没有再另外为DSP设计复位电路。

TAG下载口电路设计
图3为JTAG电路,按照仿真器的通信引脚选择14脚的仿真接口,同时要注意EMU0和EMUl信号必须通过上拉电阻连接至电源,其中上拉电阻为10kΩ。

车驱动板设计
在本装置中,我们采用BTS7960作为直流电机驱动芯片。BTS7960是集成的大电流半桥驱动,其内部包含了一片NMOS、一片PMOS和一片半桥门集驱动,在IOUT = 9 A,VS= 13.5V,Tj = 25 °C 时,其内阻抗为17mΩ。装置采用了两个直流大电机,如图4所示为驱动单个电机前后转向的电路图。

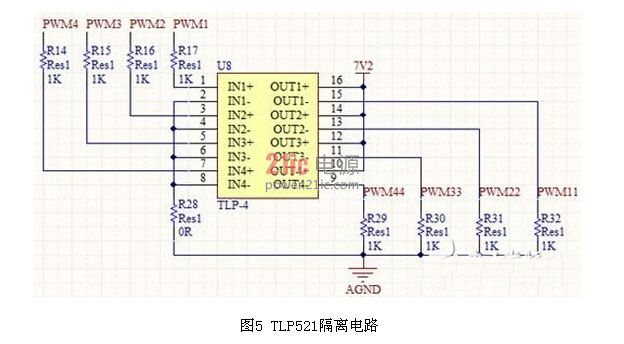
在电机驱动这里,需要注意一个细节,就是电机在转动过程中有可能会产生反向的电动势,使电流一瞬间过大,导致单片机复位甚至有可能烧坏芯片。因此在设计过程中,可以考虑在单片机PWM输入到电机驱动接口的地方添加光耦器件隔离或者二极管。如图5所示,驱动板选择了tlp521-4这种光耦器件设计隔离电路,减小电压的干扰,减化电路的设计,同时也把四路PWM的I/O电平从3.3上拉到5V。
在软件程序设计上,主要应用九自由度惯性导航传感器(ITG3200+ADXL345 +HMC5883L ),结合DSP和卡尔曼滤波算法,能实现较高精度的轮式小车导航和定位。本文所设计的轮式小车室内惯性导航装置,分析了该软件设计的各个模块的具体实现方法。经实验结果表明,该设计能够实时监测到移动机器人的位置信息,并对其能实现有效控制。同时其低成本、高精度、易操作的特点将进一步应用于例如巡逻机器人、救援机器人等专业领域,必将吸引国内外众多的投资商对其投资并进行更进一步的研发与应用,使其有着十分广大的创新创业前景、应用前景和市场前景。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。