直流伺服电机工作原理
直流伺服电机是由四个主要部件组成的组件,即直流电机、位置传感装置、齿轮组件和控制电路。直流电机的所需速度取决于所施加的电压。为了控制电机速度,电位器产生一个电压,该电压被施加到误差放大器的输入之一。
直流伺服电机工业原理
在一些电路中,控制面板用于产生与电机所需位置或速度相对应的直流参考电压,并将其应用于带电压转换器的脉冲。脉冲的长度决定了施加到误差放大器上的电压作为所需电压,以产生数字控制 PLC 或任何其他设备所需的速度或位置。
反馈传感器通常是电位器,它们通过齿轮机构产生与电机轴绝对角度相对应的电压。反馈电压值施加在输入误差比较器放大器上,将由电位计反馈产生的电机当前位置产生的电压与电机所需位置产生的电压进行比较,以减少正电压或负电压的误差。只要存在误差,该误差电压就会随着误差增加施加到电枢的输出电压而增加。比较放大器放大误差电压和相应的电枢功率,电机填充误差为零。如果误差为负,则电枢电压消失,因此电枢电压反转,电枢沿相反方向旋转。
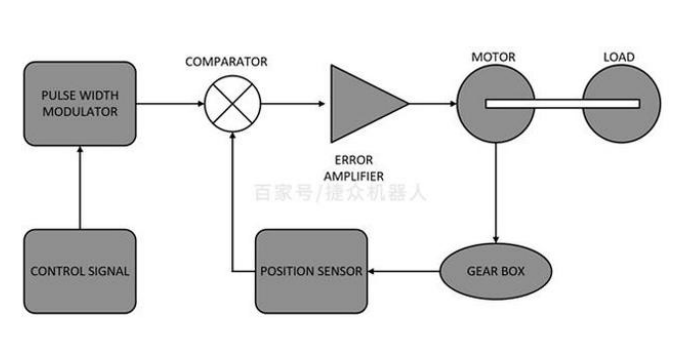
考虑以下由不同块组成的框图,其中简要解释了每个块的功能。
马达
它是一个普通的直流电动机,其励磁绕组是他励的。根据励磁的性质,可进一步分为励磁控制和电枢控制伺服电机
加载
它连接到电机的机械轴。它可以是任何工业负载或简单的风扇负载。
齿轮箱
它充当机械传感器,根据应用将电机的输出转换为位置、加速度或速度的形式。
位置传感器
它感应转子的位置并将其馈送到比较器。常用的传感器是霍尔效应传感器。
比较器
它比较位置传感器的输出和参考点以生成误差信号并馈送到放大器。如果电机以精确控制运行,则没有误差为零。变速箱、位置传感器和比较器使系统闭环。
放大器
它放大了比较器的误差,以馈入电机。它就像一个比例控制器,其中增益被放大以实现零稳态误差。
控制信号和脉宽调制器
根据反馈信号,受控将输入提供给脉冲宽度调制器,该调制器调制电机的输入(电压或励磁)以实现精确控制或零稳态误差。脉宽调制器进一步使用参考波形和比较器来产生脉冲。
通过使系统闭环获得准确的位置、加速度或速度。伺服电机这个名称意味着一种受控电机,由于反馈和控制器的作用,它可以提供所需的输出。误差信号被放大并用于驱动伺服电机。基于产生控制信号和脉宽调制器的性质,伺服电机可以使用数字信号处理器或FPGA芯片拥有先进的控制技术。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。