如何对移动条件FB ONL和FB SPS进行编程呢?
来源: 电子工程世界
新闻行业新闻
对移动条件 FB ONL (仅当)进行编程:
应用移动条件是为了能有目的地让机器人停机,例如出现故障情况或者在锁闭的时候。
用此指令可编程设定机器人行驶的条件(布尔算子)。 在需要时,可对多个算子 (最多到 11 个)进行逻辑连接。 如果该机器人移动的条件不再能满足,则机器人将停止。
移动条件 FB ONL 将在向目标点运动的过程中与 PLC 触发器不同步地激活。并且保持激活状态直至编定了新的移动条件 FB ONL或 FB PSPS 程序。

只要满足下列条件,则机器人将一直移动:输入端 100 为 TRUE。如果输入端为 FALSE,则机器人将停止。
对移动条件 FB PSPS 进行编程:
应用移动条件是为了能有目的地让机器人停机,例如出现故障情况或者在锁闭的时候。
用此指令可编程设定机器人行驶的条件(布尔算子)。 在需要时,可对多个算子 (最多到 11 个)进行逻辑连接。 如果该机器人移动的条件不再能满足,则机器人将停止。
移动条件 FB PSPS 将在目标点处激活,或在用 PLC 触发器定义的到达目标点之前的一个时间点处激活。并且保持激活状态直至编程设定了新的移动条件FBPSPS 或移动条件 FB ONL。
移动条件 FB PSPS 将覆盖之前程序编定的移动条件 FB ONL.

只要满足下列条件,则机器人将一直移动:输入端 200 为 TRUE。如果输入端为 FALSE,则机器人将停止。
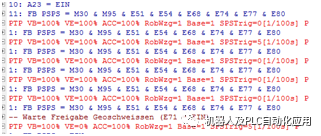
大众程序中广泛使用了FB PSPS,例如:
文章来源于: 电子工程世界原文链接
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。