ADAS视频采集和注入解决方案 | CANoe+DYNA4+VX1161.51
先进驾驶辅助系统(ADAS,Advanced Driver Assistance Systems)是指通过各种感知传感器、高精地图、规控算法以及数据处理等技术提供驾驶辅助功能。ADAS系统可以提高车辆的安全性和舒适性。
摄像头是停车、防撞、车道保持、交通标志识别、前灯辅助、车内和驾驶员监控等不可或缺的一部分。摄像头种类、数量和功能的不断增加使得在真实车辆中测试各种条件下的算法训练变得越来越困难。视频注入是ADAS系统测试中必不可少的一个重要环节,可以是真实数据的回灌,也可以是复杂的极限工况下的虚拟视频场景的注入。在真实工况有限的情况下,可以通过实验室虚拟视频场景对算法进行迭代,然后借助大量的真实场景数据再进行回灌,从而修正算法。虚拟场景的注入是对真实场景中Corner Case的有效补充。虚拟场景虽然不能完全取代真实场景,但可以实现所有能够设想出来的场景案列对算法进行训练,从而可以实现最大化场景的测试。
Vector针对行业需求,推出一整套视频采集和注入解决方案,其工作原理如下:
该系统具有高速率、通道丰富、同步精度高、可扩展等优势,支持更高级别智能驾驶控制器的数据采集和回灌,通过PTP进行时间同步,同步精度可以达到纳秒级。
该方案包括CANoe、DYNA4和VX1161.51板卡。CANoe是集仿真、分析、测试于一体的综合性平台,其最新版本中提供ADAS相关的窗口,方便ADAS测试以及观测传感器相关的变量。同时无缝集成DYNA4车辆模型并进行联合仿真,通过总线接口与ECU总线信号进行交互。
DYNA4是一款被充分验证的乘用车和商用车(包括传统油车和新能源车所需的各种部件系统)的虚拟车辆仿真环境,其物理模型包括车辆动力学、动力系统、内燃机、电动机、ADAS传感器和交通环境。通过DYNA4进行虚拟仿真测试有助于安全高效地进行功能开发和验证。DYNA4具有道路、基础设施及交通等环境的3D模拟功能,为整车虚拟仿真、驾驶辅助和无人驾驶提供重要的仿真环境平台。
DYNA4具有以下出色特点:
>
出色的3D可视化
>
用户可扩展的多样化对象库,包含标志、车辆、自行车、行人、动物等元素
>
支持开放式OpenDRIVE道路网络环境下的驾驶仿真
>
支持OpenScenario场景的导入导出
>
支持创建具有规定行为的仿真场景,例如NCAP
>
支持随机性场景,例如在交通拥挤的公路上驾驶
>
支持摄像头、激光雷达、雷达和超声波传感器的决策层目标列表和感知层信号仿真
>
环境感知:车道检测、交通标志识别、目标检测、同步定位以及地图(SLAM)等
>
舒适性功能:自适应巡航控制(ACC)、交通堵塞辅助、辅助泊车等
>
安全系统:预碰撞、前碰撞警告(FCW)、自动紧急制动(AEB)、车道保持辅助、盲点监控等
>
联网协同驾驶(V2X)
>
支持MIL、SIL到HIL以及CI/CT测试
>
支持FMU、ROS和ADTF
VX1161.51板卡是专门为视频注入设计的板卡,支持两种ECU接口:一种是GMSL,另一种是FPDLink3。
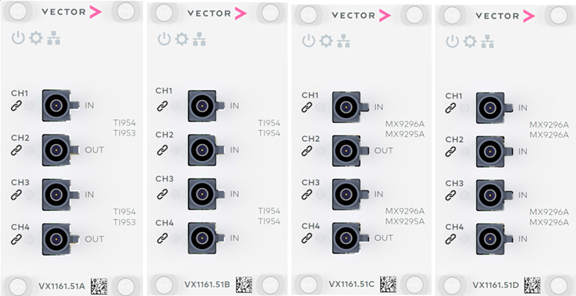
根据接口类型以及使用场景,该板卡分为四种不同的变型:
>
VX1161.51A:FPD_Link3、2xTI954/TI953
>
VX1161.51C: GMSL2 、2xMX9296A/MX9295
>
VX1161.51B: FPD_Link3、4xTI954
>
VX1161.51D: GMSL2、4xMX9296A
其前面板如下所示:
本文以VX1161.51A为例对其使用场景和配置做简单描述。VX1161.51A 2xTAP TI954/TI953是一款用于FPD-LINK III数据流的双通道卡,两个通道均包含一个Texas Instruments DS90UB954解串器和一个Texas Instruments DS90UB953串行器。
VX1161.51A可用于以下场景:
Video RX/TAP(视频接收/记录)
Video TX(视频传输/回放)
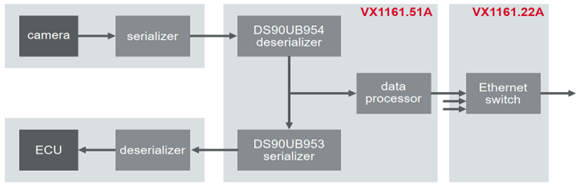
如果通道配置为TAP模式(在VXconfig中配置为TAP_RX + TAP_TX),摄像头通过FPD-LINK III接口发送数据流到VX1161.51A,由DS90UB954 TAP解串器接收。然后将数据流发送至DS90UB953 TAP串行器,最后发送给ECU。此外,数据流可发往记录数据处理器进行数据记录。如下图所示:
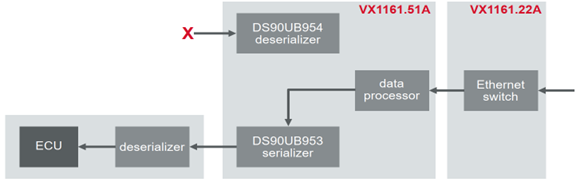
如果通道配置为TX模式(在VXconfig中仅配置为TX_only),即为视频回放或者回灌模式,路试的实际数据或者来自DYNA4虚拟视频的数据流通过DS90UB953串行器输出到ECU。然后对ECU内部的算法进行训练,也可以实际场景数据加上虚拟场景数据相结合对算法进行训练。其连接方式如下图所示:
根据以上连接方式,实际运行如下:

其运行结果如下图所示:
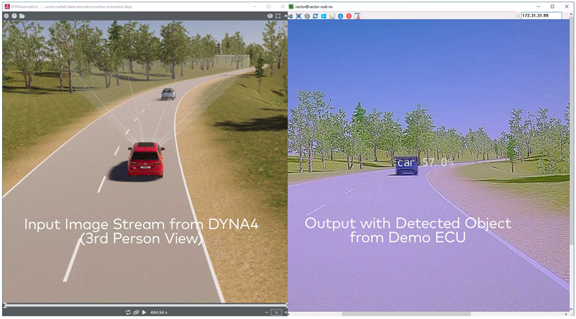
通过以上实例可知,该方案能够很好地满足不同客户的需求:既支持实际视频数据的回放,也支持虚拟视频的注入,还支持两种数据的叠加。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。