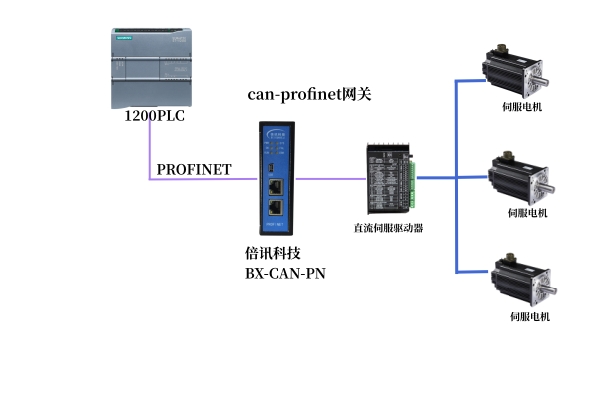
Profinet转Can协议网关和西门子PLC和直流伺服驱动器通讯案例
深圳某自动化有限公司在国内的一个运行项目中,项目要求控制中心系统通过向直流伺服驱动器,发送不同的命令报文控制驱动器的启停和运行速度,进而控制驱动器下端连接的四台伺服电机的转动速度。控制中心系统使用的是西门子 S7-1200 PLC,支持 Profinet 总线协议,直流伺服驱动器支持 CAN 协议
解决方案:
由于直流伺服驱动器正常工作时支持 CAN 协议通讯,控制中心系统西门子 S7-1200 PLC 支持 Profinet总线协议通讯,作为 Profinet 主站,两种协议不同,不能直接连接实现数据交换,需通过第三方协议转换模块才能实现不同协议间的数据交换。
北京倍讯科技自主研发生产的Profinet转Can网关能够实现 CAN 协议转换为 Profinet协议,很好地实现监控中心系统通过西门子 S7-1200 PLC ,根据直流伺服驱动器的通讯命令报文发送不同的命令,控制驱动器所连接的伺服电机的启停和运转速度,保证控制中心系统能够远程控制伺服电机的运转和启停,确保整个自动化项目的顺利实施!
配置参数说明:
由于 CAN 协议为底层协议,Profinet转Can网关有 8 个拨码开关和 CAN 设备通讯时只需使用拨码开关设置 CAN的波特率和 CAN2.0A 或 CAN2.0B 及选择 16 个字节输入输出就可以可以实现 CAN 通讯了。
Profinet转Can网关 Profinet端(用户不需了解,网关内部会自行处理)和 CAN 端的数据格式如下:(参考Profinet转Can说明书)
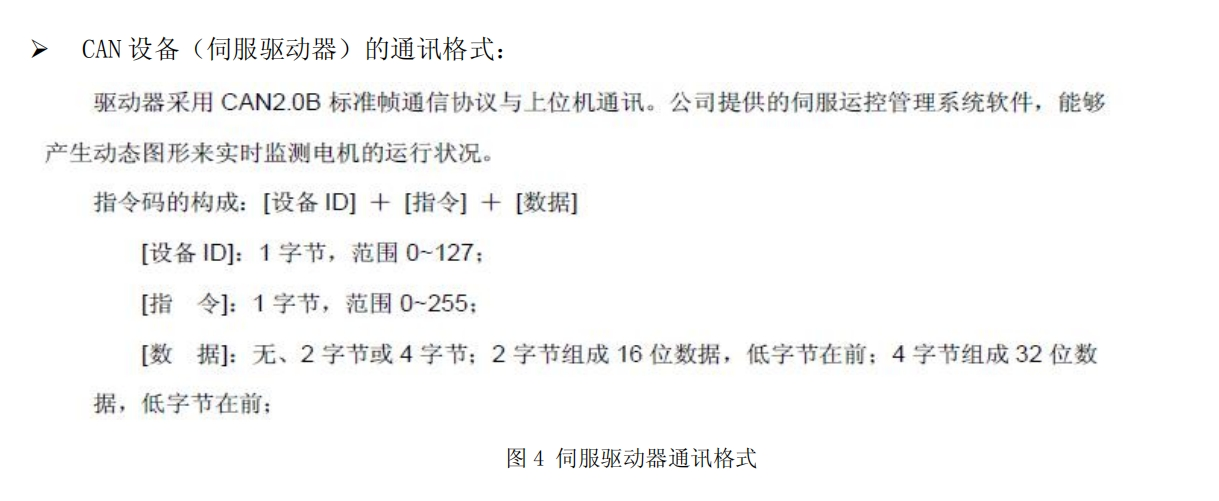
CAN 设备(伺服驱动器)的通讯格式:
由于网关的 Profinet端和 CAN 端使用 16 个字节的输入输出数据格式通讯,为了保证通讯数据的完整性和准确性,在 组态软件中需要配置对应的输入输出数据长度让 16字节的输入输出数据在映射到PLC的IQ地址中数据块中通讯,如下图所示

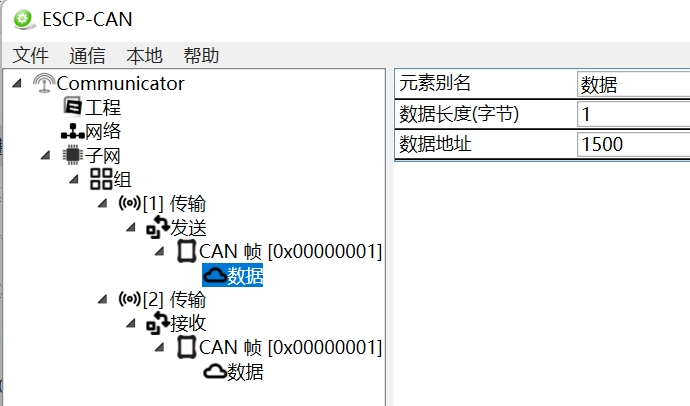
Profinet主站向 CAN 设备输出的数据报文。
结论:
通过使用倍讯科技技术有限公司的Profinet转Can网关,能够实现控制中心系统远程实时监控直流伺服驱动器进而控制驱动器下端所连接的伺服电机的起停和转速,确保了项目的可实施性。Profinet转Can在整个项目过程中,运行稳定、可靠!
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。