车载通信技术(二): 车内总线通信技术
第一篇文章提到,汽车相关的通信网络,可分为车内有线连接网络和车外无线连接网络。随着智能网联汽车的发展,对车辆内、外通信的需求越来越高,也推动着车内网络和车外网络的发展。
本篇主要来讲解下车内总线技术。
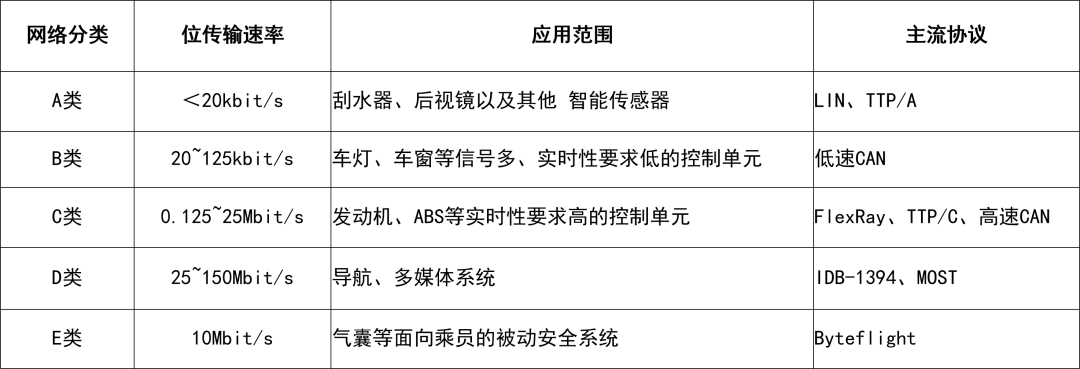
目前各个国家和公司存在多种车载网络标准。美国汽车工程师学会(SAE)按照汽车上网络系统的性能,把汽车网络划分为不同的等级标准,即A类、B类、C类、D类和E类。
常用车内总线通讯技术有CAN、LIN、FlexRay、MOST和LVDS等。除LVDS外,其他都是专门为汽车行业设计的通信网络。
一、CAN通讯技术
CAN 是一种世界标准的串行通讯协议,为数据高速公路确定统一的“交通”规则。CAN 是由ROBERT BOSCH 公司和Intel公司专门为汽车内数据交换开发的总线系统。CAN是一种总线型、串行通信、广播式网络,节点间通过双绞线连接。它不仅能简化车辆各电子控制单元的设计和安装,还减轻布线的重量和降低了对空间的要求。

工作原理
当一个节点要向其它节点发送数据时,该节点的CPU 将要发送的数据和自己的标识符传送给本节点的CAN芯片,并处于准备状态;
当它收到总线分配时,转为发送报文状态。CAN 芯片将数据根据协议组织成一定的报文格式发出;
网上的其它节点处于接收状态。每个处于接收状态的节点对接收到的报文进行检测,判断这些报文是否是发给自己的,以确定是否接收它。

CAN控制器:接收由控制单元微处理器芯片传来的数据。CAN控制器对这些数据进行处理并将其传递给CAN收发器;同样CAN控制器也接收收发器传来的数据,处理后传递给控制单元微处理器。
CAN收发器:具有接收和发送的功能。它将CAN控制器传来的数据转化为电信号并将其送入数据传输线;同样也为CAN控制器接收和转化数据。
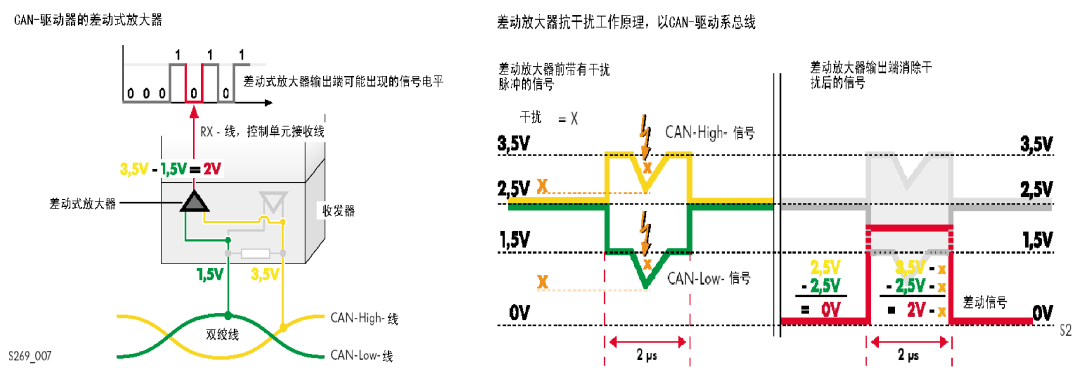
数据传输线:它是双向的,对数据进行传输。这两条线传输相同的数据,分别被称为CAN高线和CAN低线。
CAN通讯具有抗干扰能力强的作用,而且信号是从双线信号中获取。
CAN仲裁机制
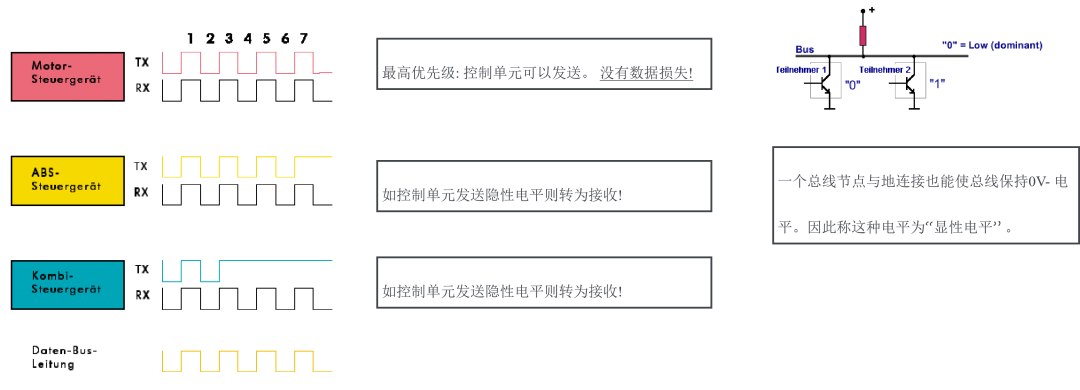
因内部时钟的关系多个控制单元在信息流动时都要取用总线上的数据,因此只能等到信息结束(至少连续出现11个隐性电平)。信息结束时多个控制单元又要同时发送数据。
解决方案:标识符表示不同的优先级。最高优先级的电平为0,它可以覆盖所有其它的电平。如果一个要发送数据的控制单元,其隐性电平被覆盖了,那么它将停止发送而只能接收流动的数据。
CAN一般燃油车的CAN网络分类

CAN网关是整个CAN网络的核心, 控制着整车5条CAN总线的各类信号转发与处理

二、LIN通讯技术
LIN,为局部连接网络(Local Interconnect Nework),最初由奥迪、宝马、大众、摩托罗拉等汽车及其供应商组成的LIN联盟提出。
LIN是一种低成本、串行通信网络,通信接口为UART。LIN分主节点和从节点,通过单线连接。LIN主要应用通信带宽要求比较低车身控制方面,如车窗、座椅等,作为CAN通信补充。
基本工作原理
LIN总线上的所有通讯都由主机节点中的主机任务发起。主机任务根据进度表来确定当前的通讯内容,发送相应的帧头,并为报文帧分配帧通道。
总线上的从机节点接收帧头之后,通过解读标识符来确定自己是否应该对当前通讯做出响应、做出何种响应。一个报文帧可以同时被多个节点接收利用。

三、FlexRay通讯技术
FlexRay总线数据收发采取时间触发和事件触发的方式。利用时间触发通信时, 网络中的各个节点都预先知道彼此将要进行通信的时间, 接收器提前知道报文到达的时间, 报文在总线上的时间可以预测出来。即便行车环境恶劣多变,干扰了系统传输, FlexRay协议也可以确保将信息延迟和抖动降至最低,尽可能保持传输的同步与可预测。这对需要持续及高速性能的应用( 如线控刹车、线控转向等)来说,是非常重要的。
它采用了周期通信的方式, 一个通信周期可以划分为静态部分、动态部分、特征窗和网络空闲时间4个部分。静态部分和动态部分用来传输总线数据,即FlexRay报文。特征窗用来发送唤醒特征符和媒介访问检测特征符。网络空闲时间用来实现分布式的时钟同步和节点参数的初始化。
四、MOST通讯技术
MOST (Media Oriented System Transport) 面向媒体的系统传输总线,MOST 是汽车业合作的成果,而不具备正式的标准。它是一种专门针对车内使用而开发的、服务于多媒体应用的数据总线技术。MOST 表示“多媒体传输系统”。
MOST总线工作原理:MOST 总线利用光脉冲传输数据,采用环形结构,在环形总线内只能朝着一个方向传输数据。MOST 总线的传输技术近似于公众交换式电话网络( Public Switched Telephone Network;PSTN),有着数据信道(Data Channel)与控制信道(Control Channel)的设计定义,控制信道即用来设定如何使用与收发数据信道。一旦设定完成, 资料就会持续地从发送处流向接收处, 过程中不用再有进一步的封包处理程序, 将运作机制如此设计, 最适合用于实时性音讯、视讯串流传输。
MOST在制订上完全合乎ISO/OSI的7层数据通讯协议参考模型,而在网线连接上MOST采用环状 拓朴, 不过在更具严苛要求的传控应用上, MOST也允许改采星状( 亦称放射状) 或双环状的连接组态,此外每套MOST传控网络允许最多达64个的装置(节点)连接。
五、LVDS通讯技术
LVDS,为低电压差分信号(Low Voltage Differential Signaling),是一种低压差分高速信号标准。
LVDS 信号传输一般由三部分组成:差分信号发送器,差分信号互联器,差分信号接收器。差分信号发送器:将非平衡传输的TTL 信号转换成平衡传输的LVDS 信号。差分信号接收器:将平衡传输的LVDS 信号转换成非平衡传输的TTL 信号。

按目前汽车电子发展趋势来看,汽车电子产品的架构形态逐渐由分布式向集中式域控制器方向发展。那么主机与显示分域处理也将越来越多,分域处理的实质就是控制、功能、数据处理/保存等由主机完成,视频及图像显示由显示屏来完成,由于车内的结构特殊性,其分布的形态也不尽相同,这样导致主机与屏可能相差10cm,也有可能相差100cm,甚至可能相距更远。
目前行业中解决主机与显示屏之间的音视频、控制数据的传输方案,多是采用TI的FPD-link、美信的GMSL、THINE的V-by-One®等相关技术。国内暂时还没有看到集成串行及解串技术的芯片。
FPD-Link 串行器和解串器技术简介:FPD-Link是TI研发的高速串行与解串接口,目前已经发展到了第三代。FPD-Link视频数据速率达到350Mbit/s。FPD-LinkII传输速率可达1.8Gbit/s。FPD-Link III 在一个差分对上可以进行双向通行,除了传输视频数据外可以传输一些控制信号,传输速率大于3 Gbit/s。可用于传输I2C、IIS、I/F、UART、SPI、SMC 、PWM、ADC。主要研究厂家:TI。主要客户:德系/日系/美系/国产等。
GMSL串行器和解串器。技术简介:GMSL由MAXIM开发,实现对数字视频和音频数据进行串行转换,然后通过一对双绞线串行传输,后端由解串芯片进行解码还原,最大传输速率可达6Gbps。可用于传输I2C、IIS、I/F、UART、SPI、SMC 、PWM、ADC。主要研究厂家:MAXIM。主要客户:日系、国产等。
V-by-One®串行器和解串器。技术简介:V-by-One® HS是由thine独立开发的技术,利用1对线缆来传输高画质影像的新技术,由1到8组讯号配对组合,每组讯号的最大传输速度为3.75 Gbps,总体讯号线输出从4pin到18pin左右。可用于传输I2C、IIS、I/F、UART、SPI、SMC 、PWM、ADC。主要研究厂家:THINE、索喜(富士通)等。主要客户:日系、国产等。
APIX串行器和解串器技术技术简介:全称Automotive Pixel link,Inova半导体公司的一项用于传输图像和视频数据的技术,APIX总线包含两条屏蔽的成对双绞线,可用于双向数据传输,主要用于汽车娱乐信息系统的通讯。第一代技术传输速率可达1Gbps,第二代技术传输速率可达1Gbps,第三代技术可达12Gbps。主要用于传输I2C、IIS、I/F、UART、SPI、SMC 、PWM、ADC等。主要研究厂家:索喜(富士通)、东芝等。主要客户:宝马、路虎等。
LVDS FPDLIN&GSML
What does GMSL stand for? Gigabit Multimedia Serial Link (千兆多媒体串行链接)
What does it do?
Transports high-speed data such as video over a twisted pair or coax cable
Supports a variety of video interfaces (RGB, OpenLDI (LVDS), MIPI CSI-2 & DSI, HDMI)
Aggregates video, audio and clock as well as bi-directional data onto one stream

LVDS Splitter and Cropping
IVI 目前基本都有支持多个显示屏,而部分处理器受限于视频接口数量,故而产生 Splitter 应用;
Supper Frame and MST technology 支持2个视频合并传输;
TI 941AS(or 98x)兼容 FPD-Link Ⅲ 的 Deserializer (92x or 94x);

可以看到TI 的FPD-LINK IV支持的格式非常多种,而且对于高清2K,4K的车载显示屏,直接支持的EDP接口,这样可以直接点屏,而且还支持菊花链的串联形式,这样在布局走线的时候,可以有部分线材从从机端布局,这样整体线材布局非常方便(比如娱乐驾驶的副屏,完全可以从中控主机这边出线),这样线材会变短,辐射没有那么大,容易过EMC实验,也节省成本,整体的布局也方便。


可以看到美信的GMSL 三代产品,有比较大的带宽回传技术,同时支持ASIL B的功能安全,在ADAS领域是非常具有优势


六、车载以太网技术
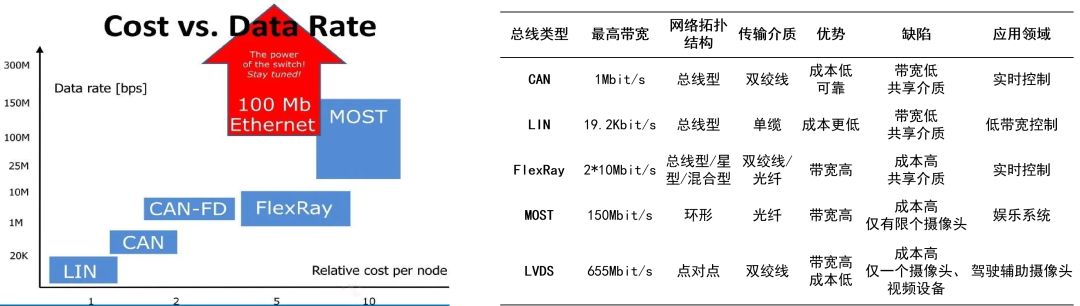
各传统车载网络从带宽和成本关系可看出,它们在带宽和成本上所占据的范围几乎没有重叠区域,并且成本和带宽呈现递增关系。这反映出网络在汽车领域已被不同的车用总线所“瓜分”,而且这些总线在各自领域呈现出独霸一方的局面。然而,随着车载以太网的技术成熟和引入,面对着车载以太网海量的带宽能力,对于跟车载以太网成本相当甚至更高FlexRay和MOST总线,以及其应用复杂等缺陷,可能有被淘汰的命运。
传统车载网络能满足汽车部分子系统的要求,总体来说,优势在于实时性。但普遍存在的问题是带宽低,成本高。传统以太网与车载以太网最大不同是传统以太网需要2-4对线,车载以太网只需一对,且是非屏蔽的,仅此一项,可以减少70-80%的连接器成本,可以减少30%的重量。这是车载以太网诞生的最主要原因。同时也是为了满足车内的EMC电磁干扰。
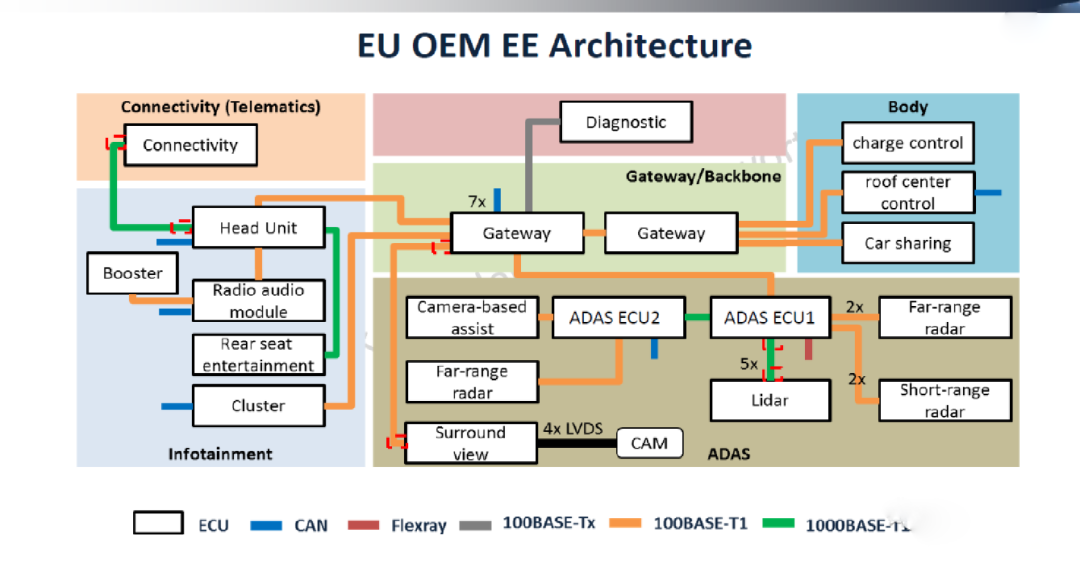
在车载网络方面,玩家是很多的,也推出了各自的标准,如下:其中OPEN Alliance和电气与电子工程师协会(IEEE)制定的标准是车载以太网领域比重最大和应用最广泛的,例如我们熟知的100BASE-T1和1000BASE-T1。

自1980年以来,IEEE一直负责以太网的维护、开发和标准化。尽管各个公司都可提供专有的以太网解决方案,但大多数时候公司都会交给IEEE进行标准化以确保更广泛的应用。802工作组则专门负责以太网,因此,所有与以太网相关的标准都以802开头(例如,IEEE 802.1,IEEE 802.2,IEEE 802.3等)。
OPEN Alliance SIG是由汽车制造商和供应商组成的联盟,目的是促进以太网在汽车工业中的进一步发展。OPEN Alliance SIG与IEEE合作,将汽车以太网转换为通用标准。就目前的车载以太网标准方面,主流标准的是如下几个,目前主要是第二个100BASE-T1:用单对双绞线实现100Mbit/s的数据传输,走的靠前的OEM则使用更快的千兆以太网。

四个车载以太网物理层标准,10Base-T1S是试图取代传统的CAN网络的。第一个1000Base-T1标准的物理层芯片是Marvell的88Q2112,虽然其推出时间是2015年10月,但在2019年才量产,典型应用如英伟达的旗舰盒子Pegasus。
2020年11月,博通宣布推出BCM8989X 和BCM8957X,BCM8989X是业内第一个对应NGBase-T1(即IEEE 802.3ch)标准的MACsec 物理层芯片,到目前为止,博通是唯一能提供NGBase-T1芯片的厂家。BCM8957X则是业内第一个支持10Mbps 到10Gbps速率的L2/L3级车载以太网交换机芯片。

车载以太网是基于TCP/IP的网络模型,因此我们先不考虑应用层数据是根据哪种应用层协议组织的,从应用层来的数据,经过传输层会加上TCP/UDP报头,再到网络层的IP报头,然后到链路层增加MAC地址等信息,最后由PHY转换成线路上的二进制流实现在发送端和接收端的数据传输。




车载以太网短期内无法全部取代现有CAN网络,其在汽车行业上的应用需要一个循序渐进的过程,大致可分为 3 个阶段:局部网络阶段、子网络阶段多子网络阶段。
局部网络阶段:可单独在某个子系统上应用车载以太网技术,实现子系统功能,如基于 DoIP 协议的 OBD 诊断、使用IP 协议的摄像头等;
子网络阶段:可将某几个子系统进行整合,构建车载以太网子系统,实现各子系统的功能,如基于 AVB 协议的多媒体娱乐及显示系统、ADAS 系统等;
多子网络阶段:将多个子网络进行整合,车载以太网作为车载骨干网,集成动力、底盘、车身、娱乐等整车各个域的功能,形成整车级车载以太网络架构,实现车载以太网在车载局域网络上的全面应用。

本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。