基于西门子S7-1200PLC的编程控制案例
来源: 电子工程世界
新闻行业新闻
 一、动作描述
一、动作描述
1.我们在模拟软件上搭建了一个简单传送带,并配置了控制面板;
2.通过模式选择开关,可以选择自动/手动模式;
3.自动模式下按自动启动按钮,引入传送带自动运行,当货物触碰A传感器时,长传送带正方向运转,当货物触碰B传感器时,长传送带反方向运转。
4.按下停止按钮,传送带停止;
5.手动模式下,按前进按钮,传送带正方向点动运转,按后退按钮,传送带反方向点动运转;
6.另有指示灯显示当前运行状态。

 二、硬件设备
二、硬件设备
1.一台装有博途及其仿真软件、FACTORY IO软件的PC。
三、软件
1.西门子PLC编程软件:TIA 博途V16
2.博途仿真软件:PLCSIM V16
3.FACTORY IO软件
四、I/O分配
| 输入点 | 注释 | 输出点 | 注释 |
| I0.0 | 开始按钮 | Q0.0 | 开始指示灯 |
| I0.1 | 停止按钮 | Q0.1 | 停止指示灯 |
| I0.2 | 传感器A | Q0.2 | 长传送带正方向 |
| I0.3 | 传感器B | Q0.3 | 长传送带反方向 |
| I0.4 | 手动前进 | Q0.4 | 引入传送带运行 |
| I0.5 | 手动后退 | Q0.5 | 塔灯绿 |
| I0.6 | 自动模式 | Q0.6 | 塔灯黄 |
| I0.7 | 手动模式 |
五、程序编写及思路
为便于后期修改,我们把外围设备统一做成DB块,如图:

并通过一个FC块,来完成DB块和实际IO变量表的映射:
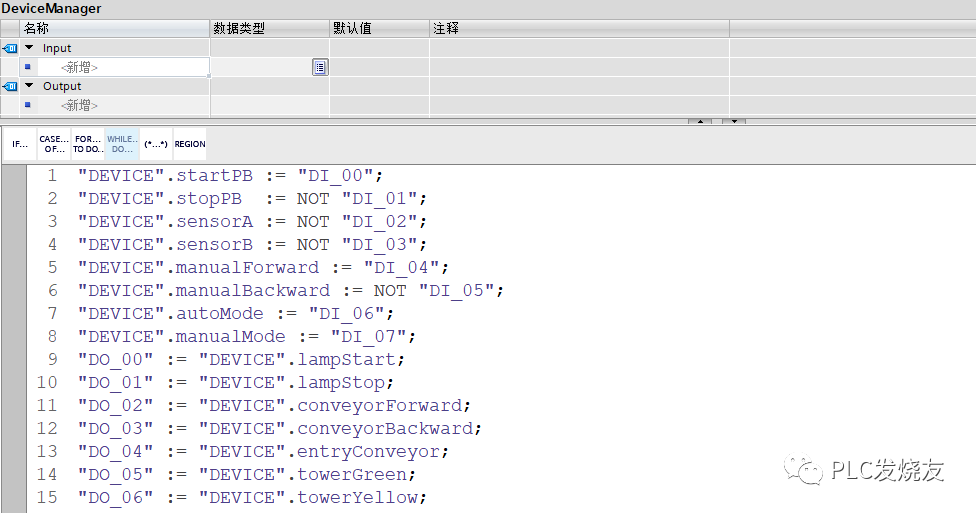
接下来我们开始写程序:
首先我们定义两个传感器的上升沿:

然后通过旋钮选择运行模式:

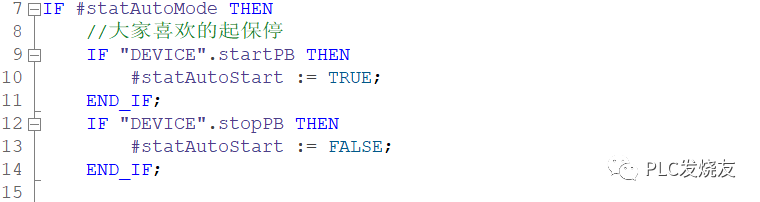
分自动模式和手动模式分别编写程序,首先编写自动程序:
在自动模式下按下启动按钮,则启动自动运行;按下停止按钮则停止自动运行。
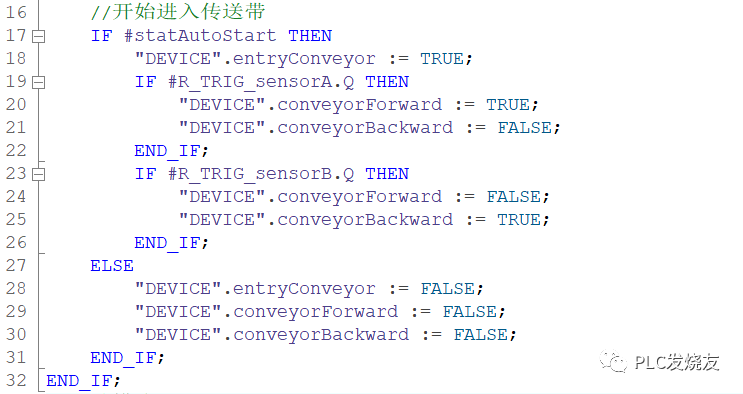
在自动运行模式下,引入传送带直接运行,然后判断货物是否触碰传感器。触碰传感器A,则传送带正方向运行;触碰传感器B,则传送带反方向运行;如果自动运行模式丢失,则停止所有传送带运行:
接着写手动模式,手动模式简单用按钮控制:

最后相应信号输出指示灯:

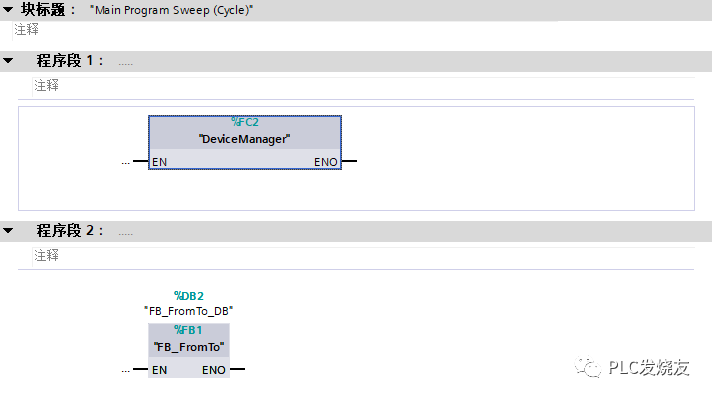
程序完成,在主程序里进行调用即可。
总结:此程序虽然简单,用LAD写更简单,但目的是培养SCL高级语言编程的基本逻辑和基本语法,提高综合编程能力。
文章来源于: 电子工程世界原文链接
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。