CANOPEN伺服电机的回零控制方法分享
通过总线控制伺服电机时,如何进行回零(寻参考点)控制?这里就CANOPEN伺服电机的回零控制方法分享给大家。
设置回零模式
在CANopen DSP402协议中,伺服电机进行回零动作时,其操作模式由6060h确定,当给6060h的值为6时,则将伺服电机切换为回零模式(HOMING MODE)。在回零动作启动前,可以通过读取6061h的值,以确认电机模式是否设置成功。
一般伺服电机是可以支持多种回零方式的,例如电机使用的是增量编码器,那么可以选择通过C脉冲的回零方式;如果电机使用的是串行编码器或旋转变压器,那么就不能选择通过C脉冲的回零方式。
回零启动控制
当回零模式设置完成后,可以通过控制字启动回零动作。

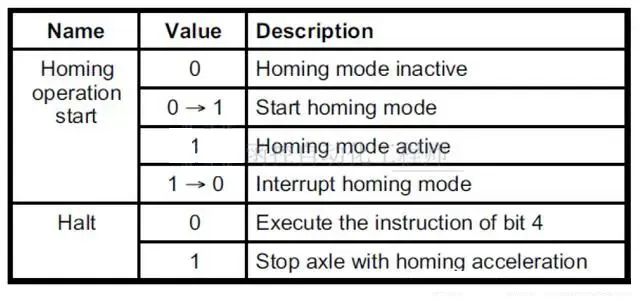
Controlword

与回零动作相关的控制字
在回零模式下,控制字各位的说明:
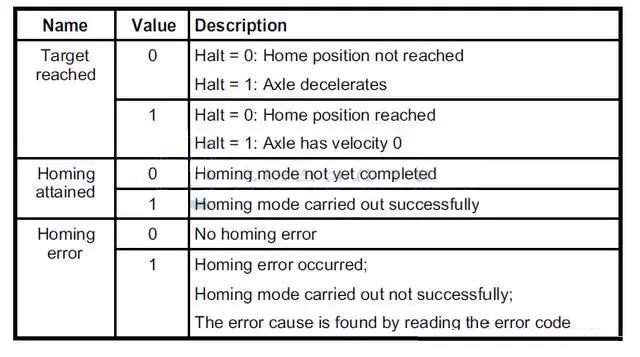
回零模式状态字:

回零模式下,状态字各位表示的伺服电机反馈状态的说明:
与回零动作相关的参数
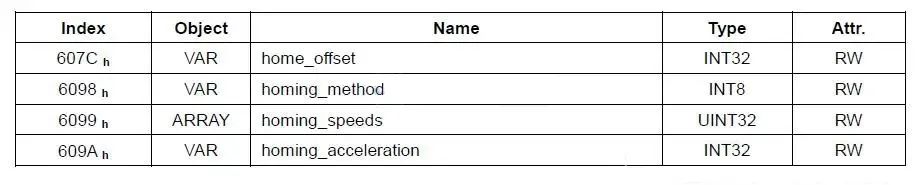
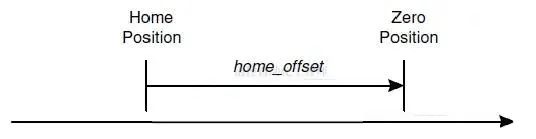
home_offset:参数确定了参考点位置与零位之间的距离。
homing_method:有4种信号可作为回零信号:正限位开关、负限位开关、参考点开关和C脉冲。

homing_speeds:找参考点需要2种速度:找参考点速度和找零位速度。
homing_acceleration:回零期间的加速度和减速度,均是homing_acceleration。
回零的方法
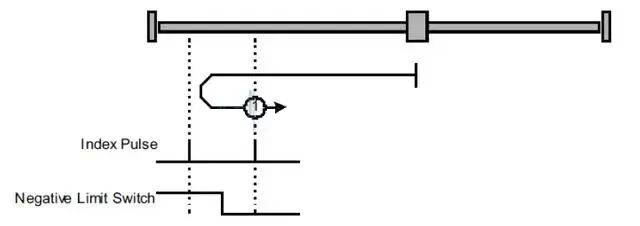
方法1 使用C脉冲和负限位开关
驱动器首先较快的向负方向移动,直到撞到负限位开关(N-OT)才减速停止;然后驱动器慢速返回,寻找目标零位位置。本回零方法的目标零位位置是离开限位开关后编码器的第一个C脉冲位置。
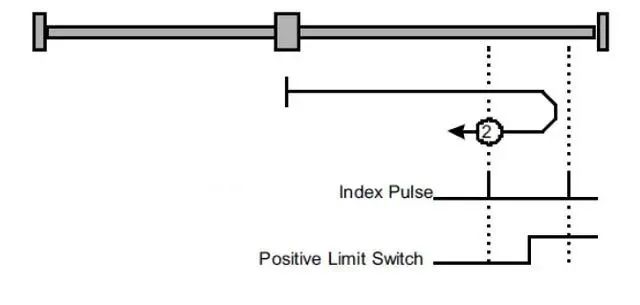
方法2 使用C脉冲和正限位开关
驱动器首先较快的向正方向移动,直到撞到正限位开关(P-OT)才减速停止;然后驱动器慢速返回,寻找目标零位位置。本回零方法的目标零位位置是离开限位开关后编码器的第一个C脉冲位置。
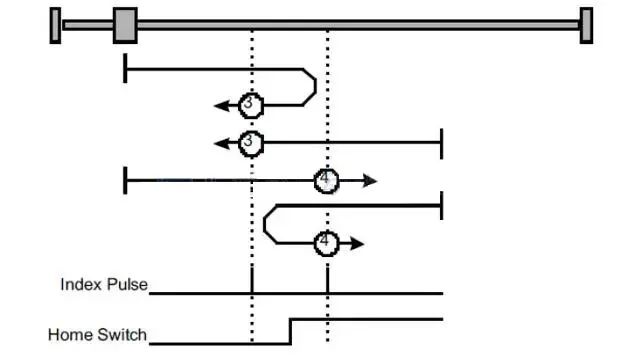
方法3和4 使用C脉冲和参考点开关
驱动器初始方向移动依赖于参考点开关状态。目标零位位置是参考点开关左边或右边的第一个C脉冲位置。
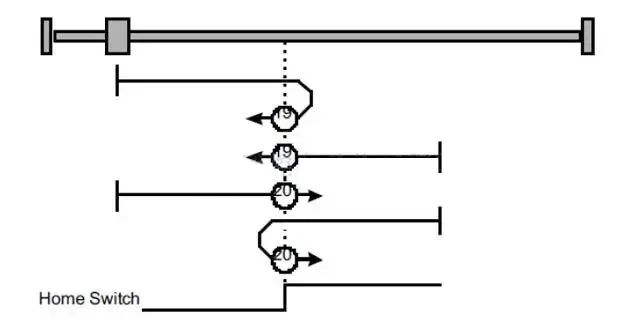
方法17 ~ 20 不使用C脉冲
这4种回零方法分别类似方法1~4,只是目标零位位置不再使用C脉冲,而依赖限位开关或参考点开关的变化。例,如下图所示方法19和20回零方法分别类似方法3~4。
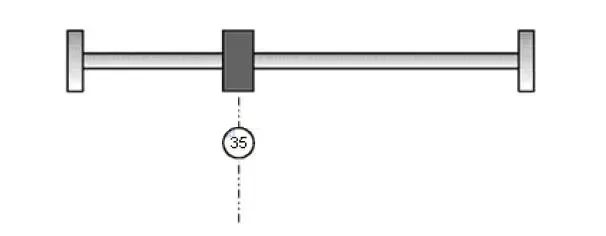
方法35 当前位置为零点
当前位置即为系统零点。
注意:在使用与外部输入信号有关的回零方式时,启动回零时电机的旋转方向与输入信号的初始状态有关,必要时可以通过设置将输入口取反改变其初始状态。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。