与华为工程师探讨HUAWEI ADS 2.0 高阶智能驾驶系统的几个问题

NO.1 AITO问界M5高阶智驾版搭载的ADS 2.0 与博世L2级别的LCC有哪些不同?
华为ADAS工程师YOGA:在ADAS领域,现在车企大量使用的是博世的系统,最多支持L2级别的功能,就是LCC自适应巡航,也就是说:它还做不到避障功能。如果前面有障碍物,它会撞上去。华为的ADS 2.0 高阶智驾系统的LCC功能则既能道内避障也能借道避障。这个能力是华为最近OTA优化的。

相比较特斯拉大多数只能在高速使用这个功能或者城区特定区域使用,华为ADS 2.0 在城区不需要特定区域也可以使用。(工科女补充:根据余总的说法,比如上海城区80%以上工况都是可以依靠自动驾驶的)。
华为ADS 2.0用法也很简单,使用华为的智能座舱,打开功能按键,语音说出目的地,从此地到目的地就可以实现自动驾驶。中途如果出现异常,它会提醒司机接管。
NO.2华为的城市NOA自动驾驶是否符合法规要求呢?
华为ADAS工程师YOGA:我们是符合法规的。华为有强大的法务团队,把相关法规研究得非常透彻,是按照相关要求去开发的。
比如说如果你的手30秒没有接触方向盘,它会提醒你,你要搭一下方向盘。如果你持续不碰方向盘的话,系统会减速、刹停或者退出自动驾驶。系统可能会判断你生病了,或者疲劳了,不会再继续让你使用自动驾驶。
NO.3摆脱完全依赖高精地图有什么好处?
华为ADAS工程师YOGA:AITO问界M5高阶智驾版已经不再完全依赖高精地图。但是用户其实是无感的,因为,用户只能看到导航标记,华为在背后去进行一个高精地图和无图导航的一个分辨,自动灵活地去处理。
(工科女补充:因为高精地图实在太贵了,而且中国的道路每天都在变化,实时更新也是个问题。不完全依赖高精地图,也能让HUAWEIADS 2.0 高阶智能驾驶系统迅速在各个城市落地,加速市场的推广。)
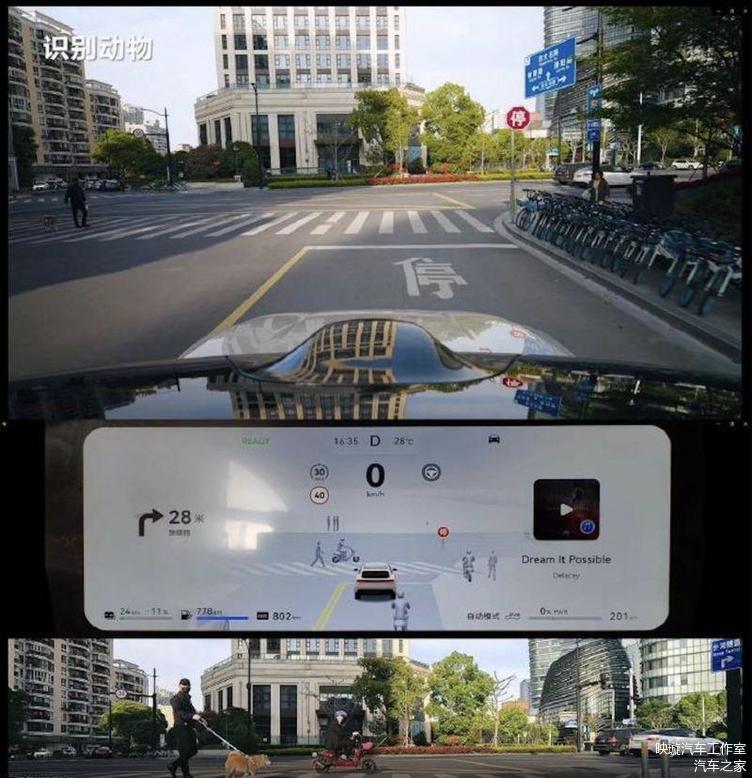
NO.4异形障碍物靠什么来探测?怎么避开?
华为ADAS工程师YOGA:我们这个叫GAEB,就是相当于把GOD网络融入到AEB(自动刹车系统)里面。传统的AEB,它指的是白名单。我们现在能做到的是,白名单以外的所有的障碍物,比如土堆,躺着的行人,只要是有高度数值的障碍物,就能进行识别。核心的硬件是激光雷达+GOD网络,GOD网络我们叫它神经网络,主要功能是对通用障碍物的检测,因为消费者听不懂,所以,我们叫它异形障碍物。它是通过激光雷达来实时检测的,然后3D点云快速传输,快速处理。这点和白名单有所不同。白名单是通过雷达等视觉设备来检测的,然后对机器进行训练识别。激光雷达+GOD网络不需要训练。
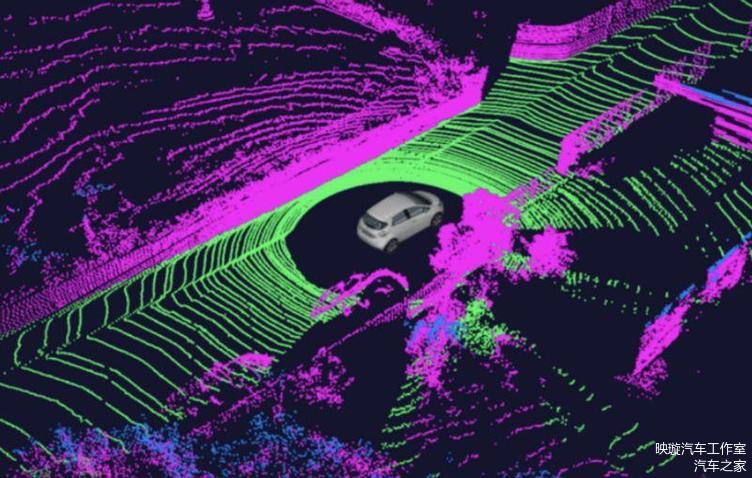
这一点和特斯拉也有区别。特斯拉FSD所谓感知万物的网络在北美是有类似GOD的神经网络的,但是,特斯拉不用激光雷达。(工科女补充:因为成本问题,特斯拉不喜欢用激光雷达,而是依靠纯视觉,摄像头,来扫描构建 3D 世界,特斯拉号称纯视觉比激光雷达还要厉害。从而改变了只有“白名单”物体才能被避让的时代。)
图注:特斯拉的纯视觉检测搭建的3D云
华为也考虑过纯视觉的方案,不过考虑到中国的路况比北美要复杂得多,处于安全考虑,最后还是用了激光雷达的方案。同样背靠长城的毫末智行在技术研发的风格上与特斯拉最为相近,最终也是采用了激光雷达的方案。
好了,看了以上对HUAWEIADS 2.0 高阶智能驾驶系统的问题解析,你对AITO 问界M5 ( 参数 | 询价 ) 高阶智驾版究竟有啥能耐,一定有了更多认识吧?请点赞关注收藏。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。