一个关于STM32 CAN出错恢复的话题
最近有个STM32 用户咨询:
“最近在使用stm32f105做双can通信,can驱动芯片使用的TJA1042,发现将canH canL 短路再放开以后,can出错恢复不回来?之前在K40上使用的时候没有这个问题,不知道这个情况大家有什么指导建议啊?”
另外,他还附上了基于STM32CUBEMX工具配置的相关代码如下:
hcan1.Instance = CAN1;
hcan1.Init.Prescaler = 2;
hcan1.Init.Mode = CAN_MODE_NORMAL;
hcan1.Init.SJW = CAN_SJW_1TQ;
hcan1.Init.BS1 = CAN_BS1_8TQ;
hcan1.Init.BS2 = CAN_BS2_7TQ;
hcan1.Init.TTCM = DISABLE;
hcan1.Init.ABOM = DISABLE;
hcan1.Init.AWUM = DISABLE;
hcan1.Init.NART = DISABLE;
hcan1.Init.RFLM = DISABLE;
hcan1.Init.TXFP = DISABLE;
HAL_CAN_Init(&hcan1);
从用户的描述来看,应该是CANH/CANL短路时导致错误而进入离线状态。
其实,CAN硬件是具备出错管理和离线恢复功能的。在STM32参考手册的CAN出错管理章节有相关描述。
CAN协议所描述的出错管理,完全由硬件通过发送错误计数器(CAN_ESR寄存器里的TEC域),和接收错误计数器(CAN_ESR寄存器里的REC域)来实现,其值根据出错情况作增加或减少。关于TEC和REC管理的详细信息,需参考CAN标准。此外,CAN_ESR寄存器提供了当前错误状态的详细信息。通过设置CAN_IER寄存器(比如ERRIE位),当检测到出错时软件可以灵活地控制中断的产生。
关于离线恢复
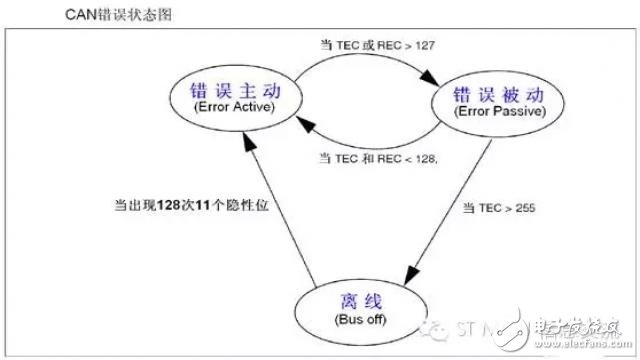
当TEC大于255时,bxCAN就进入离线状态,同时CAN_ESR寄存器的BOFF位被置’1’。在离线状态下,bxCAN无法接收和发送报文。
根据CAN_MCR寄存器中ABOM位的设置,bxCAN可以自动或在软件的请求下,从离线状态恢复(变为错误主动状态)。在这两种情况下,bxCAN都必须等待一个CAN标准所描述的恢复过程(CAN RX引脚上检测到128次11个连续的隐性位)。
如果ABOM位为’1’,bxCAN进入离线状态后,就自动开启恢复过程。
如果ABOM位为’0’,必须通过软件请求bxCAN先进入初始化模式然后退出并进入正常模式,随后才能启动恢复过程。
注: 在初始化模式下,bxCAN不会监视CAN RX引脚的状态,这样就不能完成恢复过程。为了完成恢复过程,bxCAN必须工作在正常模式。
用户给出的配置代码并未出现使能ABOM功能的语句,那关于ABOM的默认值又是怎样呢?
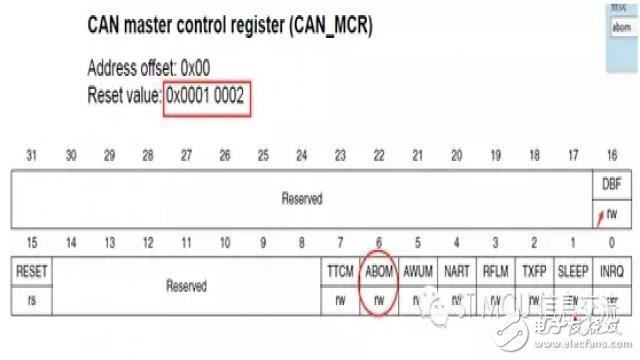
从CAN_MCR寄存器的初始值来看,位ABOM默认初始值是0,即没有开启自动离线恢复功能。
既然这样,用户要么借助出错中断和查询CAN_ESR中的BOFF位来进行软件手动恢复,要么修改配置代码,将ABOM使能,实行离线自动恢复。
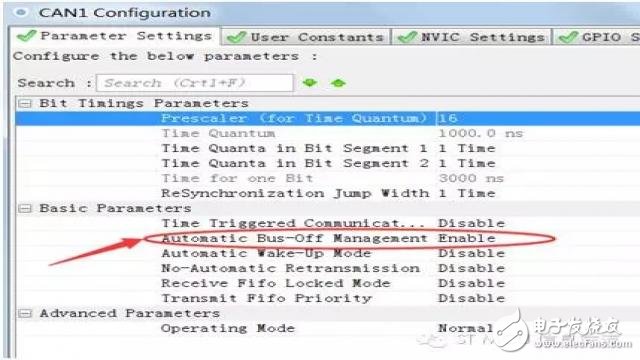
后来用户将配置代码调整,使能了ABOM, 代码中加入hcan1.Init.ABOM
= ENABLE; 即OK。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。