什么是编码器,它如何提高逆变器和电机驱动系统的性能?
在过去的几十年里,从传统的并网电机向逆变器驱动电机的过渡一直在稳步、持续地进行。这是工业旋转设备的重大转型,通过提高电机和终端设备的使用效率,不仅实现了工艺改进,还能节省大量能源。变速驱动器和伺服驱动系统提高了电机控制性能,从而可以改善要求严苛应用的质量和同步功能。如图1所示,功率级使用了功率逆变器、高性能位置检测以及电流/电压闭环反馈,因此电机性能和效率得以提高。
将变频电压施加于逆变器采用脉冲宽度调制的电机,可以实现对电机的开环速度控制。在稳态或缓慢变化的动态条件下,这将相当有效,并且较低性能应用中的许多电机驱动器采用开环速度控制,而不需要编码器。但是,这种方法有几个缺点:
● 由于没有反馈,速度精度很有限
● 由于无法优化电流控制,电机效率很低
● 必须严格限制瞬态响应,以免电机丧失同步

图1.闭环电机控制反馈系统
什么是位置编码器?
编码器通过跟踪旋转轴的速度和位置来提供闭环反馈信号。光学和磁编码器技术使用非常广泛,如图2所示。在通用伺服驱动器中,编码器用于测量轴位置,从中可推导出驱动器转速。机器人和离散控制系统需要准确且可重复的轴位置。光学编码器由带有精细光刻槽的玻璃圆盘组成。当光穿过圆盘或从圆盘反射时,光电二极管传感器检测光的变化。光电二极管的模拟输出经过放大和数字化处理后,通过有线电缆发送到逆变器控制器。磁编码器由安装在电机轴上的磁体和磁场传感器组成,传感器提供正弦和余弦模拟输出,输出经过放大和数字化处理。光学和磁传感器信号链类似,如图2所示。

图2.(a) 光学编码器,(b) 磁编码器
电机编码器类型、技术和性能指标
单圈绝对值编码器在通电后会返回机械或电气360°范围内的绝对位置信号。电机轴的位置可以立即读取。多圈绝对值编码器不仅具有绝对位置功能,而且能提供360°圈数计数。相比之下,增量编码器提供相对于旋转起点的位置。增量编码器提供一个索引脉冲来指示0°,并提供一个单脉冲来计数圈数,或提供一个双脉冲来提供方向信息。
编码器的分辨率是指电机轴旋转360°时可以区分的位置数量。通常,最高分辨率的编码器使用光学技术,而中高分辨率的编码器使用磁或光学传感器。中低分辨率编码器使用旋变器(旋转变压器)或霍尔传感器。光学或磁编码器使用高分辨率信号调理。大多数光学编码器是增量式的。编码器可重复性是一项关键性能指标,用于衡量编码器返回到同一指令位置的一致性。这对于重复性任务至关重要,例如在PCB制造过程中,放置半导体所用的机器人或贴片机须具有良好的可重复性。
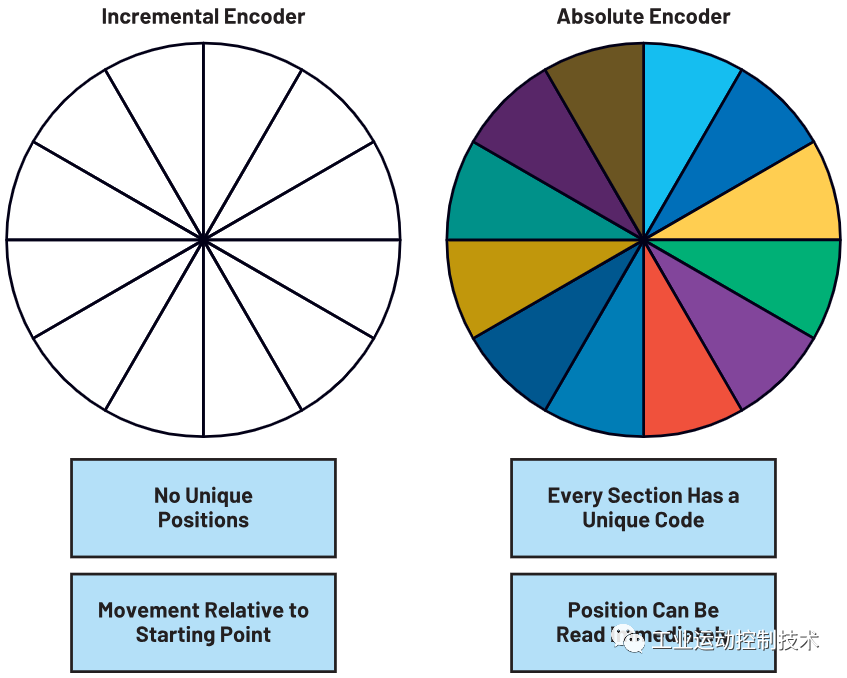
图3.编码器类型
表1.编码器关键性能指标

电机编码器精度和可重复性的重要性
贴片机/机器人是食品包装和半导体制造行业中常用的自动化机器。为了提高工艺效率,需要具有高精度和可重复性的机器或机器人。使用高性能电机编码器可实现高精度、可重复性和高效率。
图4展示了机器人中的编码器应用案例。电机通过精密减速变速箱驱动机器臂中的每个关节。机器人关节角度通过电机上安装的精密轴角编码器(θm)和机器臂上安装的附加编码器(θj)来测量。
对于机器人,数据手册上列出的主要性能规格是可重复性,其数量级通常在亚毫米级。在了解可重复性规格和机器人的作用范围之后,就可以推断旋转编码器的规格。

图4.电机编码器(θm)和关节编码器(θj)的角度可重复性,以及机器人作用范围(L)
关节编码器所需的角度可重复性(θ)可从三角函数得出:机器人可重复性除以作用范围的反正切。

多个关节结合起来可实现机器人的整体作用范围。传感器应具有比目标角度精度更高的性能。必须改善每个关节的可重复性规格,这里假设改进10倍。对于电机编码器,可重复性由齿轮比(G)定义。
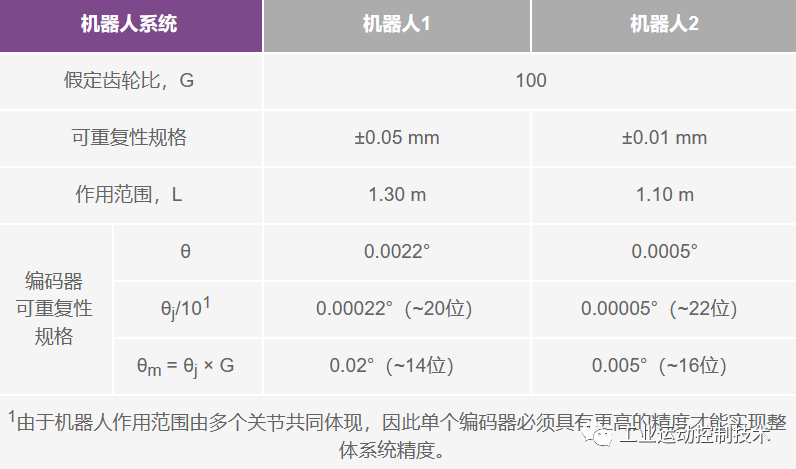
例如,对于表2所示的机器人系统,关节编码器需要20位到22位的可重复性规格,而电机编码器需要14位到16位的分辨率。
表2.编码器可重复性和机器人可重复性规格
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。