基础知识之激光二极管
一、何谓?
(Laser Diode) 的LASER是取“Light Amplification by Stimulated Emission of Radiation(基于受激发射的光放大)”的首字母组成的缩写单词,也被称为半导体激光器,通常简称为LD。
本文引用地址:由于可产生波长及相位等性质完全一样的光,因此相干性高(coherent)是其最大特点。
利用注入电流产生的光在2片镜片之间往返放大,直至激光振荡。简单的说,激光二极管也可以说成是一个通过反射镜将光放大的发光LED。

作为元件材料,使用AlGaAs、InGaAlP、InGaN、ZnO等化合物半导体,由于LSI及Tr、Di等使用的Si跃迁概率(电流转变为光的概率)较差,因此不适用于激光二极管。
激光二极管和LED的区别
将激光二极管和LED的区别汇总在了下表中。 由于激光二极管的谱宽是狭窄单一的波长、相位整齐、指向性高的光,因此具备容易控制能量的特征。

二、激光二极管的特点和用途
激光二极管的用途示例
激光二极管充分利用直进性、微小光斑尺寸 (数um~)、单色性、高光密度、相干性 (coherent) 这些特点,被用在各种应用上面。 最近,运动传感器、HDD热辅助磁性记录、照明(投影仪、前照灯)上也在使用。
下表中汇总了按激光二极管的功能分类的用途示例。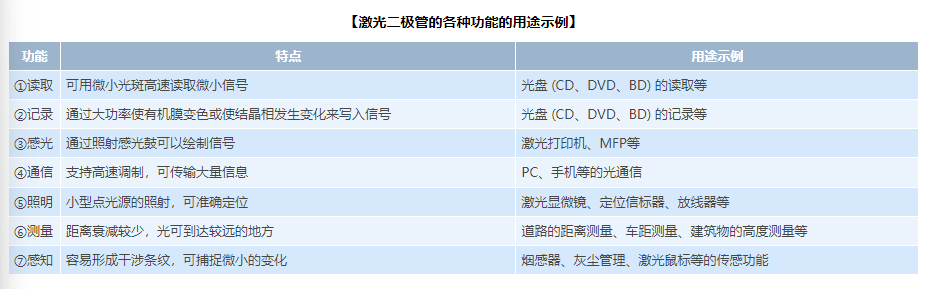
三、激光二极管的封装
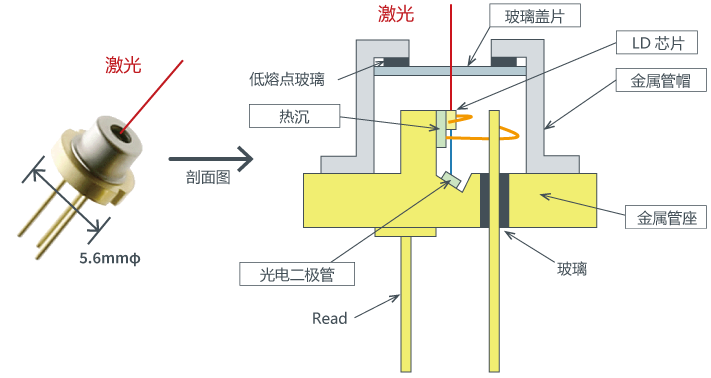
LD封装
激光二极管的封装,主流为业内标准的φ5.6mm CAN型,也有重视成本类型的没有玻璃盖片的产品。
【5.6φ CAN封装】
在Quad beam LD及部分通信类产品中,尺寸大的有φ9.0mm,备有各种封装。另外,在光盘领域,为了进一步降低成本,也有采用树脂制作的框架封装等。
【框架封装示例】

四、激光二极管的芯片结构
LD芯片结构
法布里-珀罗型LD是由n/p包层、夹在包层之间的有源层(发光层) 和2片镜片端面构成。
由于包层材料的禁带宽度比有源层宽,因此将载体(电子和空穴)能量性的封闭起来。并且,由于包层材料的折射率比有源层小,因此光也封闭在有源层内。(与光纤的原理相同)
有源层和包层由纳米级可控的外延生长生产,条形(电极)以微米级可控的光刻法制作。
【激光二极管的芯片结构】
法布里-珀罗型LD:一种最简单的激光二极管的结构。
外延生长:薄膜结晶生长技术的一种,在原有晶片上进行生长,使之以电路板结晶面一致的结晶排列生长。
光刻法:一种将涂敷了感光性物质的表面曝光,利用曝光部分和未曝光部分生成图案的技术。
五、注入电流-光输出 (I-L) 特性
何谓注入电流-光输出 (I-L) 特性?
下图是注入电流-光输出 (I-L) 特性。 如果激光二极管通过放大得到的增益(Gain)高于内部损耗和磁镜损耗,则产生振荡。即存在振荡电流阈值。 最大输出受到扭折(电流-光输出直线的折弯)、COD(端面光破坏)、温度引起的热饱和等的限制。
【注入电流-光输出 (I-L) 特性】

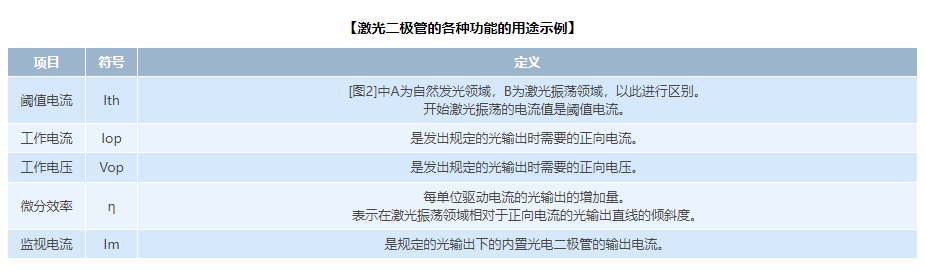
【激光二极管的各种功能的用途示例】
注入电流-光输出 (I-L) 特性:测量方法
测量激光二极管的光输出时使用光功率计。
设置受光面时,使激光的所有光束都入射到光功率计的受光面上。
将受光面相对光轴倾斜5~20°,以避免来自光功率计受光面的反射光返回到激光二极管。
I-L特性表示正向电流 (IF) 和光输出 (PO) 的关系,可读取阈值电流 (Ith) 和工作电流 (Iop) 。
监视电流 (Im) 是用内置的光电二极管监视从激光芯片后面射出的激光时的输出电流。
【测量示意图】
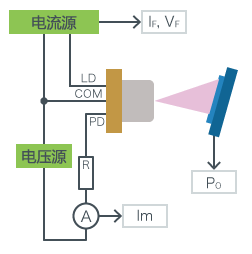
注:因为这些测量受温度影响很大,所以请在激光二极管上安装散热板,使用温度控制器在控制壳体温度的状态下测量。
六、激光的形状
远场图 (FFP:Far Field Pattern)
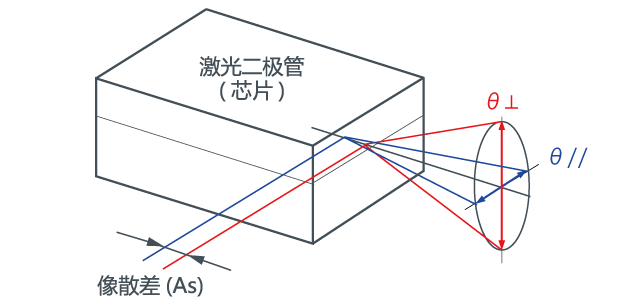
辐射到离芯片端面足够远的地方的光的强度分布称为远场图。
半导体激光器发出的光并不都是直线光,因衍射导致扩散发射。 由于芯片内的共振器(有源层和条形电极)的垂直方向是以数10nm级,水平方向是以数μm级制作而成,因此一般来说,远场图在有源层上的垂直方向比水平方向要大。

远场图: 测量方法
使用APC驱动器,使激光二极管的光输出保持一定。 光电二极管的受光面朝向激光芯片的发光面,在以发光点为中心的圆周上使之移动,测量正面为0度时的角度和光强度的关系。 在激光芯片的有源层上,沿水平方向和垂直方向分别进行移动。
【测量示意图】

APC驱动器:
Auto Power Controll的简称,是输出一定驱动的意思。 LED通常使用的是ACC(恒流驱动),但LD的用途上,使用ACC时输出的稳定程度不够。因此,一般的激光二极管中都内置光电二极管用于监视,设置在封装内部,使之能够接收到来自芯片后端的光。 使该光电二极管的输出 (Im:监视电流)保持一定的反馈驱动电路叫作APC驱动器(电路)。
七、激光二极管的振荡波长
振荡波长 (λ)
振荡波长用符号λ表示,单位是nm(纳米)。 由有源层结晶材料具有的禁带宽度和芯片结构参数的共振器长度决定。 共振器长度存在很多候选振荡波长,但禁带宽度周围增益最大的波长发生振荡。 如果结区(有源层)温度上升,则共振器长度发生物理伸长或折射率变大,如果壳体温度及光输出增大,则振荡波长将变长。

振荡波长 (λ):测量方法
使用APC驱动器,使LD的光输出保持一定。 使用集光镜头令激光入射到光纤上,再通过光纤输入光谱分析仪,观测振荡光谱。
【测量示意图】

八、像散差 (As)
何谓像散差 (As)?
激光二极管接合部在垂直方向和水平方向上外观的焦点位置不同。将这2个焦点间的距离定义为像散差 (As)。
【像散差 (As)】
像散差 (As):测量方法
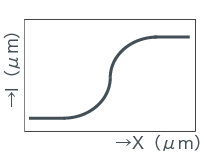
像散差通过[图1]所示的刀缘法测量。 将半导体激光器的光束用刀缘从一侧切下去。
[图1]

如果对通过刀缘的光量和刀缘的位置(X)进行绘图,就能得到激光束的积分值。
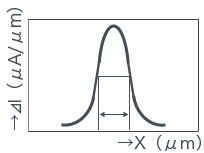
[图2]
通过将其微分,可以测量光束直径(半值全角)。
[图3]
移动半导体激光器的端面位置 (Z) ,测量光束直径。 绘制与半导体激光器的接合方向垂直、水平的各方向的光束直径和端面位置。[图4]
从2个光束直径的最小值的位置可求得像散差。
[图4]

九、LD使用注意事项
使用注意事项
1) 由于与其他的分立式产品相比,ESD水平非常低,因此如果在正向上加入浪涌,则过量发光,导致端面损坏,激光无法振荡。

ESD:
Electro Static Discharge 的简称,意思是静电放电。 2) 使用时,请不要触摸作为镜片发挥作用的端面。 (其他的分立式产品通常可以将端面作为“裁切余量”使用 。)
十、LiDAR(激光探测与测距)
什么是LiDAR?
LiDAR是Light Detection And Ranging(激光探测与测距)的缩写,是使用近红外光、可见光或紫外光照射对象物,并通过光学传感器捕获其反射光来测量距离的遥感(使用传感器从远处进行感应)方法。
也被称为“Laser Imaging Detection And Ranging(激光成像检测与测距)”,通常以脉冲状近红外激光照射对象物,计量光线到达对象物并反射回来的时间差。
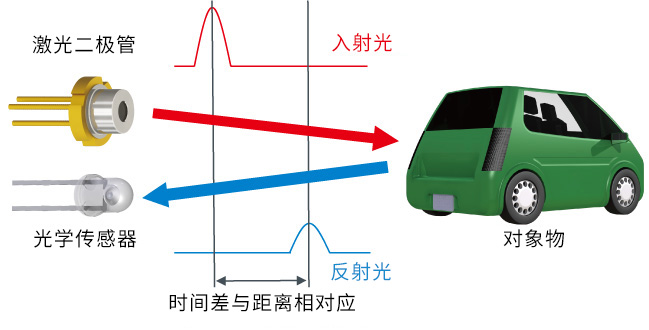
【LiDAR示意图】
LiDAR应用示例
谈到使用LiDAR技术的应用,首先想到的是汽车的高级自动驾驶系统。 据称该技术是实现全自动驾驶(五级)所必不可少的技术。
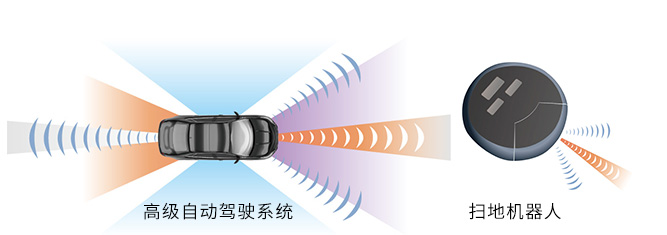
【LiDAR应用示例】
此外,该技术还被用于高精度检测人和物体,例如消费电子领域的扫地机器人和高尔夫测距仪,以及工业设备领域的自动搬运车(AGV)和服务机器人等。
高级自动驾驶系统
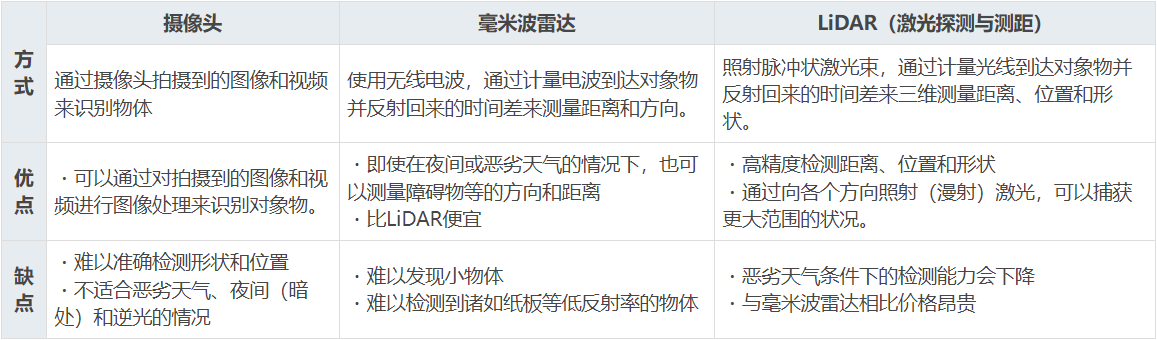
在ADAS(高级驾驶辅助系统:例如自动刹车和车道保持辅助系统)中,摄像头和毫米波雷达融合的方式是主流选择。然而,一般认为要想实现汽车的自动驾驶,则需要加上LiDAR技术,采用这三种技术相融合的方式。 可以说,要想实现高级自动驾驶系统,需要取长补短地充分利用这三种技术,并且三者缺一不可。
LiDAR用激光二极管
要提高LiDAR的性能,如实现“更长距离”和“更高空间分辨率”的感测,要求作为感测光源的激光二极管具有更高输出功率、更高效率以及更小的光束光斑。 ROHM可以提供同时满足这两项要求的激光二极管。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。