采用C8051F060单片机和现场总线CAN实现网络测控系统的设计
1 绪论
随着网络技术的不断发展,Internet把世界上分散的计算机系统、通信系统实现了互连,形成了共用数据网络,成功的实现了网络资源共享。而CAN总线技术使得控制系统向着分散化、网络化、智能化的方向发展,使控制技术与计算机以及网络技术更为紧密的结合在一起。随着CAN总线控制网络的进一步发展,控制网络与因特信息网络的结合,方便了对设备的远程监控、诊断和维护。
2 系统模型概述
本设计采用在CAN总线控制网络和因特网之间加入一个转换接口。这种方式是通过硬件来实现的,即在底层网络与中间监控层之间加入中继器、网桥、路由器等专门的硬件设备,使控制网络作为信息网络的扩展与之紧密集成。硬件设备可以是一台专门的计算机,依靠其中运行的软件完成数据包的识别、解释和转换;对于多个网段的应用,它还可以在不同网段之间存储转发数据包,起到网桥的作用。
转换接口的集成方式功能较强,但实时性较差。信息网络一般是采用TCP/IP的因特网,而TCP/IP没有考虑数据传输的实时性,当CAN设备有大量信息上传或远程监控操作频繁时,转换接口都将成为实时通信的瓶颈。但是随着因特网技术进一步发展,这个瓶颈问题将逐步得到解决。
3测控系统工作原理及组成
本系统采用C8051F060单片机作为控制网络层的核心控制器,采用三星公司的S3C2410嵌入式微处理器设计信息网络,将工业现场设备和远程服务器、工作站连为一体,构建了体积轻巧、功能强大、方便灵活的企业网络。
3.1系统方案
本系统由信息网络层和控制网络层两部分组成。信息网络层是基于S3C2410的ARM系统,运行着TCP/IP协议和现场总线CAN协议;控制网络层是基于C8051F060的控制网络测控系统,它直接与工业测控设备联系,负责测量、调节现场参数,将测量结果通过CAN送给ARM,或是接收ARM下传的数据调控现场设备。论文对CAN总线控制网络和因特网进行了深入研究,提出在提高信息网络协议标准的实时性和兼容性的基础上,从底层设备到远程监控系统都使用统一的协议标准的设计方案,以确保信息准确、快速、完整传输。本方案的优点是价格低廉、功能强大、方便灵活。整个系统的示意图如1所示。

3.2信息网络部分
信息网络要对控制系统的底层控制参数进行决策,因此信息网络在控制系统中扮演着重要的角色。一方面它要和远程PC通信,另一方面它还要和控制网络层的单片机通信,起着连接PC和工业现场智能设备的桥梁作用。
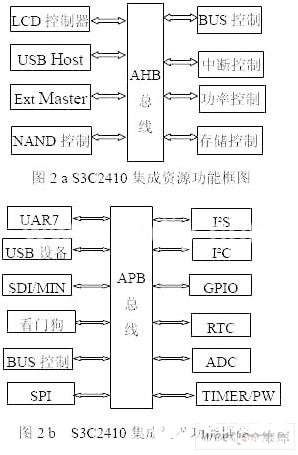
信息网络层采用的S3C2410,是韩国三星电子公司最近推出的一款基于ARM920T内核的16/32位RISC嵌入式微处理器。该处理器主要面向手持式设备以及高性价比、低功耗的应用。S3C2410内部结构较复杂,提供可扩展的功能模块也较多,如图2所示。
3.3控制网络部分
网络测控系统扩展CAN总线模块,要担负至少两个方面的任务:一是支持现场操作,包括数据采集、人-机对话等;二是与上级节点进行数据交互,作为网络测控系统的底层设备,系统结构框图如图3所示。

基于CAN总线的分布式测控卡主要由单片机C8051F060、输入/输出电路、电源电路、人-机接口和通信接口(包括RS-232和CAN总线接口)几部分组成。测控卡的工作原理如下:C8051F060单片机是完全集成的混合信号片上系统型MCU,是数据采集与实施控制的理想微型控制器。它集成了两个16位、1Msps的模拟/数字转换器,且带有DMA控制器;集成有两个12位数字/模拟转换器,具有可编程数据更新方式;集成有控制器局域网(CAN2.0B)控制器,具有32个消息对象,每个消息对象有自己的标识掩码。工业现场设备的状态参数通过I/V转换成电压信号,C8051F060单片机采集此信号后,通过CAN总线发送给上级网络节点,同时上级网络节点下传的命令和参数经DAC和V/I转换电路转换成0“20mA的电流信号,控制现场设备。人-机界面提供系统状态与操作人员的友好交流平台,且备用了一路RS-232异步串行通信总线。
4 信息网络和控制网络之间的通信
CAN与Internet是采用不同通信协议的两种异构网络。首先,CAN通信基于报文,无需为每个节点设定一个独立且唯一的地址。它采用标识符来表明报文的内容,CAN节点接受到一个报文时,通过基于标识符的滤波机制来决定处理或抛弃该报文。而Internet上的IP数据包传输是面向连接的,基于节点地址来传送,Internet上的每一个节点都必须设定一个唯一点IP地址。其次,CAN与Internet采用不同的冲突仲裁机制。CAN采用的是无破坏性仲裁机制,当多个节点同时向总线发送数据造成媒体访问冲突时,优先级较高的报文不受影响地继续发送,而优先级较低的报文会自动停止,并等待总线空闲时再尝试重新发送。。另外,CAN采用短帧结构,其最大长度只有16B。而IP数据包的长度远远超过了CAN数据帧的长度,最长可达16KB。
4.1通信方式
实现异构网络之间的通信,需要在不同的协议之间进行转换,这可通过网关来完成。网关又被称为网间协议转换器,用于连接采用不同通信协议的网络,实现网络之间的数据传输。当一个报文要求从一个网段发送到另一个网段时,网关需要完成该报文的接受、翻译与转发工作。要实现协议转换,网关必须具备它所要连接到不同网络的协议包,由于TCP/IP协议包需要较大的存储空间,因此,大多数情况都是用PC机来充当网关。但在某些情况下使用PC机并不方便,需要在MCU/MPU嵌入式系统中实现网关功能。一种方案使用高档的32位、64位MCU/MPU,内嵌了成熟的实时多任务操作系统,具有完整的TCP/IP协议包,能够很好地完成与Internet的连接。这种方案具有足够快的运行速度,采用精简的TCP/IP协议包。嵌入式设备连接到Internet,互连实现数据信息交换或者远程访问和机器控制,TCP/IP协议是互连的核心技术。
4.2软件实现
由于被测控的几个量都是缓慢变化的,对测控系统的实时性要求不高。单片机大部分时间在进行参数测量,每次测量结束后使用查询方式将测量结果保存到数据缓冲区中。由于单片机的RAM容量有限(C8051F060具有4K的RAM),使用了数据缓冲区,以保存一定数量的测量结果。缓冲区使用先进先出策略,在保存时先判断缓冲区是否填满,没满时缓冲指针加1,数据保存进下一个单元,填满时使指针指向缓冲区的顶部,数据保存进缓冲区,以前的数据丢掉。本系统的设计重点是CAN通信,因此,在CAN通信时采用了中断方式。整个测控系统部分的软件流程图如图4。

5 结束语
计算机监控系统是一个集资源管理、工业控制于一体的调度系统在此监控系统中,底层控制网络采用了CAN总线技术,节约了设备投资、提高了测量的精度和系统的可靠性;在信息网络层,采用了嵌入式微处理器,既保证了系统的可靠性,实时性,又方便了系统的维护。这些先进技术的综合运用,使生产调度监控系统不仅很好地满足了生产调度的需要,而且大大提高了生产的效率。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。