汽车智驾中的机器视觉之相机标定解析
来源: 电控知识搬运工
微信公众号资讯
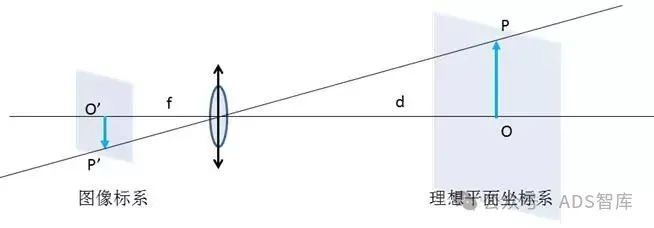
 、工作距离为
、工作距离为
 ,则
被测物
,则
被测物
 和它的像
和它的像
 关系
可简单的表示为:
关系
可简单的表示为:

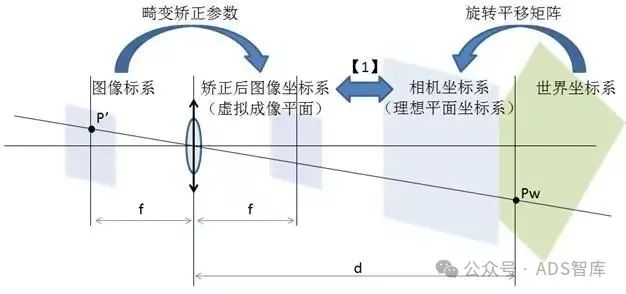
 、镜头畸变参数
、镜头畸变参数
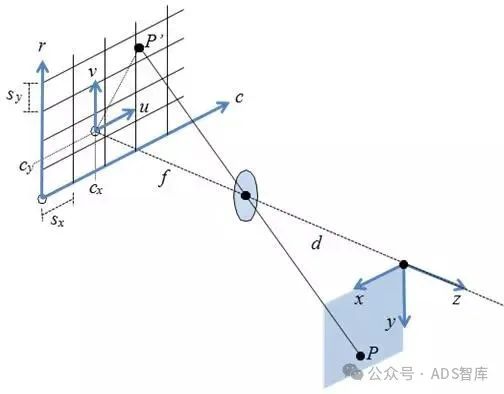
 、光轴中心坐标
、光轴中心坐标
 以及像元尺寸
以及像元尺寸
 ,当摄像机和镜头确定时,这些参数唯一确定。下面我
们来详细介绍一下各参数的数学模型。
,当摄像机和镜头确定时,这些参数唯一确定。下面我
们来详细介绍一下各参数的数学模型。
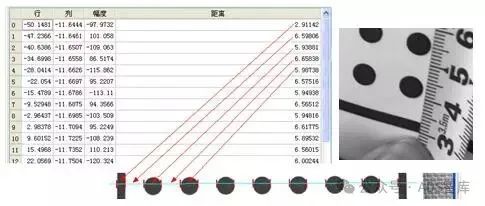
 ,在摄像机靶面所成的像为
,在摄像机靶面所成的像为
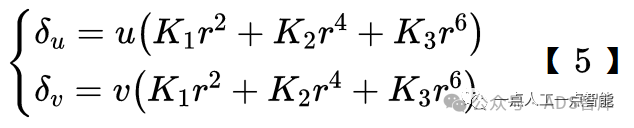
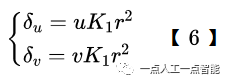
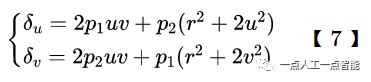
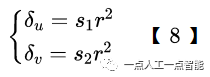
 ,根据不同的光路模型它们之间有如下的对应关系
,根据不同的光路模型它们之间有如下的对应关系
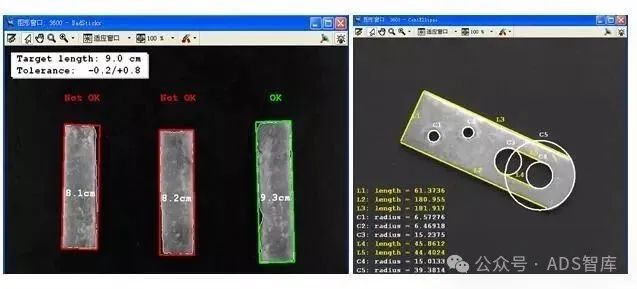
 、校正后的结果
、校正后的结果
 ,其畸变模型坐标关系为:
,其畸变模型坐标关系为:


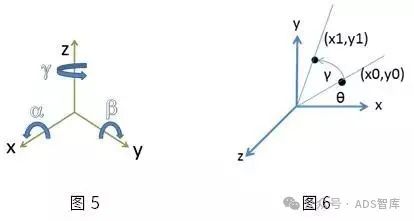
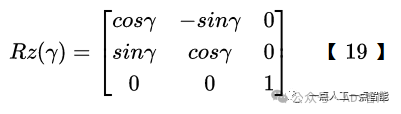
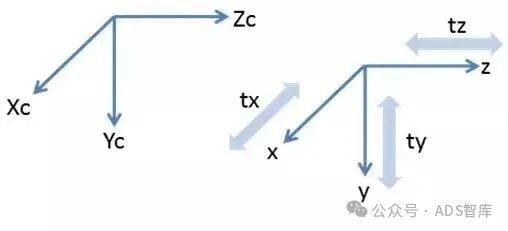
 来实现坐标系的转换。因此,旋转矩阵R可分解为
来实现坐标系的转换。因此,旋转矩阵R可分解为
 三个矩阵相乘的形式。我们以
三个矩阵相乘的形式。我们以
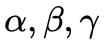
 轴为例,假设
轴为例,假设
 与
与
 轴夹角为
轴夹角为
 ,且到
原点距离为
,且到
原点距离为
 ,
通过旋转矩阵
,
通过旋转矩阵
 坐标系沿
轴旋转
坐标系沿
轴旋转
 后得到点
后得到点
 ,我们可得方程组:
,我们可得方程组:




 与
与
 轴夹角为
轴夹角为
 得
:
得
:




 和
和
 将它们与
将它们与
 相乘得:
相乘得:



本文来源:ADS智库
文章来源于: 电控知识搬运工原文链接
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。